

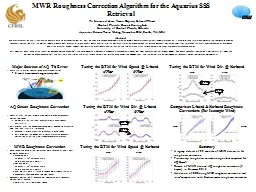
LabVIEW CODE DEVELOPMENT AT SLAC Cappelletti CERN 22 Apr 2009 I Q CW 11424 GHz KLY KLY TWT H Y B Other experiment Delay 2 round trips Mode conversion H Y B STRUCTURE ID: 580695
Download Presentation The PPT/PDF document "KLYSTRONS OUTPUT CORRECTION:" is the property of its rightful owner. Permission is granted to download and print the materials on this web site for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.


Slide1
KLYSTRONS OUTPUT CORRECTION: LabVIEW CODE DEVELOPMENT AT SLAC
Cappelletti
CERN, 22 Apr 2009Slide2
I
Q
CW @ 11.424 GHz
KLY.
KLY.
TWT
H Y B
Other experiment…
Delay (2 round trips) +
Mode conversion
H Y B
STRUCTURE
ATTENUATOR
PH. SHIFTER
ATTENUATOR
-
MODULATION
POWER SUPPLY
PULSE
COMPRESSION
FEEDBACK
SYSTEM OVERVIEW
50
M
W @ 1.5
m
s
p/2
AMP – PH DETECTION
AFG
LAPTOPSlide3
MODULATION ISSUES
User input and klystrons output are handled in terms of amplitude and phase, but practical concerns make Re-
Im
data a better choice.
Ideally, the objective is to get both a
flat top amplitude pulse to feed the compressor, and a constant phase
waveform.Slide4
REAL WORLD SIGNALS…
We always refer to
modulating
signals, but it has to be remarked that they are transmitted on a 11.4 GHz carrier
We perform a demodulation…
… through the analytical representation
s
a(t) = s(t) + j H{s(t)} = A(t)
ej(f(t))Where H{} denotes the Hilbert transform.
The main concern is flattening A(t), the phasebeing coerced to the arbitrary value of
p/4
A(t)Slide5
The basic idea is a simple point-by-point compensation.If the first input/output relation looks like
Then the input could be modified this way:
In more detail, the first step is to define an error vector intended to (iteratively) modify the input.
Error vector after 1 stepSlide6
THE CORRECTION ALGORITHM
FIND ERROR VECTOR
+
+
0
0
0
…
0
Current (ideal) input
Corresponding output
FIND ERROR VECTOR
+
+
(Initial) error vector
New input…
… and corresponding new output
…
…Slide7
The algorithm assumes a 1 to 1 correspondence between the acquired output and the ideal input: a time shift is needed and performed through a cross-correlation.
For the same reason, the output has to be properly
downsampled
(# of pts is different).
The error vector has to be opportunely (and manually!) rescaled, otherwise it won’t significantly affect the input, whose level is approximately 3 times higher.
CONVERGENCE: each iteration is triggered by a user’s command. In 3-4 steps the correction reaches its best…
OTHER ISSUES
t
=
argmax
{Rin,out}Slide8
… and the resulting pulse is already better looking.
PERFORMANCES
Example 1 (After 2 steps)
Example 2 (After 3 steps)Slide9
Basic and intermediate level training was complete.Allowed to operate ASTA’s RF power controls if supervised.
Choke seen from the
boroscope
ABOUT ASTA AND THE PETS