
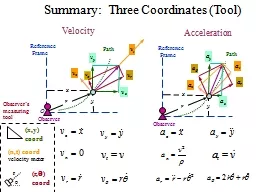
Reference Frame xy coord r q r q coord x y r Path Reference Frame x y r nt coord velocity meter Summary Three Coordinates Tool Velocity Acceleration Observer ID: 382890
Download Presentation The PPT/PDF document "1 O Path" is the property of its rightful owner. Permission is granted to download and print the materials on this web site for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.




Slide1
1
O
Path
Reference
Frame
(x,y)
coord
r
q
(r,
q
)
coord
x
y
r
Path
Reference
Frame
x
y
r
(n,t) coord
velocity meter
Summary: Three Coordinates (Tool)
Velocity
Acceleration
Observer
Observer’s
measuring
tool
ObserverSlide2
2
O
Path
Reference
Frame
(x,y)
coord
r
q
(r,
q
)
coord
x
y
r
Path
Reference
Frame
x
y
r
(n,t) coord
velocity meter
Choice of Coordinates
Velocity
Acceleration
Observer
Observer’s
measuring
tool
ObserverSlide3
3Slide4
4
Path
(x,y)
coord
r
q
(r,
q
)
coord
(n,t) coord
velocity meter
Translating
Observer
Two observers (moving and not moving) see the particle moving the same way?
Observer O
(non-moving)
Observer’s
Measuring tool
Observer
(non-rotating)
Two observers (rotating and non rotating) see the particle moving the same way?
Observer B
(moving)
Rotating
No!
No!
“Translating-only Frame”
will be studied today
Which observer sees the “true” velocity?
both! It’s matter of viewpoint.
“Rotating axis”
will be studied later.
Point: if O understand B’s motion, he can describe the velocity which B sees.
This particle path, depends on specific observer’s viewpoint
“relative” “absolute”
A
“translating”
“rotating”Slide5
5
2/8 Relative Motion (Translating axises) A = a particle to be studied
A
Reference frame O
frame work O
is considered as fixed (non-moving)
If motions of the reference axis is known, then “
absolute motion
” of the particle can also be found.
O
Motions of
A
measured using
framework O
is called the “
absolute motions
”
For most engineering problems,
O
attached to the earth surface may be assumed “fixed”;
i.e. non-moving.
Sometimes it is convenient to describe motions of a particle “
relative
” to a moving “
reference frame
” (reference observer B)
B
Reference frame B
B =
a
“(moving) observer
”
Motions of
A
measured by the observer at
B
is called the “
relative motions of A with respect to B
”Slide6
6
Relative positionIf the observer at
B use
the x
-y ** coordinate system
to describe the position vector of A we have
where
=
position vector
of
A relative to
B (or
with respect to B),
and are the unit vectors along
x and y
axes (x
, y
) is the coordinate of A
measured in x-y
frame
**
other coordinates systems can be used; e.g.
n
-t.
B
A
X
Y
x
y
O
Here we will consider only the case where
the
x-y
axis
is not rotating
(
translate only
)Slide7
7
B
A
X
Y
x
y
O
x-y
frame
is not rotating
(translate only)
Relative Motion (
Translating Only
)
Direction of frame’s
unit vectors do not change
0
0
Notation using when
B is a translating frame.
Note: Any 3 coords can be applied to
Both 2 frames.Slide8
8
Understanding the equation
Translation-only Frame!
Path
Observer O
Observer B
This particle path, depends on specific observer’s viewpoint
A
reference
framework O
O
B
reference
frame work B
A
Observer O
Observer O
Observer B
(translation-only
Relative velocity with O)
This is an equation of adding vectors
of different viewpoint (world)
!!!
O & B has a “relative” translation-only motionSlide9
9
The passenger aircraft B is flying with a linear motion to theeast with velocity v
B
= 800 km/h. A jet is traveling south with velocity vA
= 1200 km/h. What velocity does A appear to a passenger in B ?
Solution
x
ySlide10
10
Translational-only relative velocity
You can find
v
and
a
of BSlide11
11
v
A
v
B
v
A/B
Velocity Diagram
x
y
a
A
a
B
a
A/B
Acceleration Diagram
x
y
vSlide12
?
B
Yes
Yes
Yes
No
O
Is observer B a translating-only observer
relative with OSlide13
13
To increase his speed, the water skier A cuts across the wake of the tow boat B, which has velocity of 60 km/h. At the instant when
= 30
°,
the actual path of the skier makes an angle = 50°
with the tow rope.
For this position determine the velocity v
A
of the skier and the value of
Relative Motion
:
(Cicular Motion)
o
30
m
10
A
B
o
30
A
B
o
30
D
M
?
?
O.K.
Point: Most 2 unknowns can
be solved with
1 vector (2D) equation.
Consider at point A and B
as
r-
coordinate systemSlide14
14
2/206 A skydriver B has reached a terminal speed . The airplane has the constant speed and is just beginning to follow the circular path shown of curvature radius = 2000 mDetermine (a) the vel. and acc. of the airplane relative to skydriver. (b) the time rate of change of the speed of the airplane and the radius of curvature of its path,
both observed by the nonrotating skydriver. Slide15
15
(b)
the time rate of change of the speed of the airplane
and
the radius of curvature of its path
, both observed by the nonrotating skydriver.
n
tSlide16
16Slide17
17
v
a
r