PPT-Humanoid Motion Planning for Dual-Arm Manipulation and Re-Grasping Tasks
Author : giovanna-bartolotta | Published Date : 2019-11-07
Humanoid Motion Planning for DualArm Manipulation and ReGrasping Tasks Nikolaus Vahrenkamp Dmitry Berenson Tamim Asfour James Kuffner Rudiger Dillmann Institute
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Humanoid Motion Planning for Dual-Arm Ma..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Humanoid Motion Planning for Dual-Arm Manipulation and Re-Grasping Tasks: Transcript
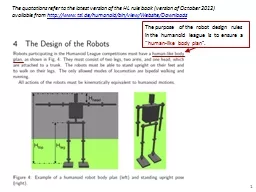
Humanoid Motion Planning for DualArm Manipulation and ReGrasping Tasks Nikolaus Vahrenkamp Dmitry Berenson Tamim Asfour James Kuffner Rudiger Dillmann Institute for Anthropometrics University of Karlsruhe. Natchanon. . Wongwilai. Adviser: . Nattee. . Niparnan. , Ph.D.. M.Eng. .. 1. Outline. Introduction. How to grasp?, Why failed to grasp?, Goal. Related Works. Vision-based grasping, Manipulation under uncertainty. Benjamin Stephens. Robotics Institute. Compliant Balance and Push Recovery. Full body compliant control. Robustness to large disturbances. Perform useful tasks in human environments. Motivation. Improve the performance and usefulness of complex robots, simplifying controller design by focusing on simpler models that capture important features of the desired behavior. Peter Brook. Matei. . Ciocarlie. Kaijen. Hsiao. Uncertainty. in Object Perception. Sensed Scene. Real Scene. Collaborative Grasp Planning with Multiple Object Representations. 2. Uncertainty. in Object . human-like body plan. ”.. The quotations refer to the latest version of the HL rule book (version of October 2012) available from . http://www.tzi.de/humanoid/bin/view/Website/Downloads. . 1. Relation 4.1.1 was introduced for the first time in 2006 and used since then “as is”. It links the kinematic robot height . Calibrating the Kinematics Model . Arm Motion Selection. Motor Torque Calculations for a Planetary Robot Arm. CS36510. 1. a) Calibrating the Kinematics Model. Resolution, Repeatability and Accuracy. Causes of Mechanical Error. P. Michel, J. . Chestnutt. , J. . Kuffner. , T. . Kanade. Carnegie Mellon University – Robotics Institute. Humanoids 2005. Objective. Paper presents . a vision- based footstep planning system that computes the best partial footstep path within its time-limited search horizon, according to problem-specific cost metrics and heuristics.. Benjamin Stephens. Thesis Proposal. Carnegie Mellon, Robotics Institute. November 23, 2009. Committee:. Chris . Atkeson. (chair). Jessica. . Hodgins. Hartmut. Geyer. Jerry Pratt (IHMC). 2. Thesis Proposal Overview. P. Michel, J. . Chestnutt. , J. . Kuffner. , T. . Kanade. Carnegie Mellon University – Robotics Institute. Humanoids 2005. Objective. Paper presents a vision- based footstep planning system that computes the best partial footstep path within its time-limited search horizon, according to problem-specific cost metrics and heuristics.. Benjamin Stephens. Robotics Institute. Compliant Balance and Push Recovery. Full body compliant control. Robustness to large disturbances. Perform useful tasks in human environments. Motivation. Improve the performance and usefulness of complex robots, simplifying controller design by focusing on simpler models that capture important features of the desired behavior. Rev. Christopher J. Respass. Grasping the Significance of Your Trials. (James 1:2-8). Trials & Tribulations are designed to . evaluate your faith. and move you closer to . Christian maturity. (v.2-3).. AGA 8. th. Annual Energy Market Regulation Conference. October 8, 2015. Terry Arbit. Norton Rose Fulbright US. terry.arbit@nortonrosefulbright.com. 202.662.0223. CFTC enforcement overview: Dodd-Frank. . SYFTET. Göteborgs universitet ska skapa en modern, lättanvänd och . effektiv webbmiljö med fokus på användarnas förväntningar.. 1. ETT UNIVERSITET – EN GEMENSAM WEBB. Innehåll som är intressant för de prioriterade målgrupperna samlas på ett ställe till exempel:. 9. th. IEEE-RAS International Conference on Humanoid Robots. December 8, 2009. Modeling and Control of Periodic Humanoid Balance Using the Linear Biped Model. Introduction. 2. Motivation. 3. Simple models for complex systems. Overview. Used Python, . Pygame. , and . Numpy. Extended LT’s skeleton code. Configurations found using inverse . jacobian. “Phantom” linkage method . Path planning using RRT. Implicit map . vs.
Download Document
Here is the link to download the presentation.
"Humanoid Motion Planning for Dual-Arm Manipulation and Re-Grasping Tasks"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents