PPT-Fitting Fitting We’ve learned how to detect edges, corners, blobs. Now what?
Author : jewelupper | Published Date : 2020-06-23
We would like to form a higherlevel more compact representation of the features in the image by grouping multiple features according to a simple model Source K Grauman
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Fitting Fitting We’ve learned how to d..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Fitting Fitting We’ve learned how to detect edges, corners, blobs. Now what?: Transcript
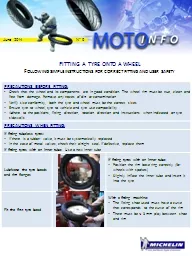
We would like to form a higherlevel more compact representation of the features in the image by grouping multiple features according to a simple model Source K Grauman Fitting Choose a parametric model . How to remove Steiner points. Lior. . Kamma. , . Weizmann Institute of Science. Joint work with . Robert . Krauthgamer. and . Huy. L. . Nguyễn. TexPoint. fonts used in EMF. . Read the . TexPoint. Photo frames. Easy to use templates. Jo. Rectangle (vector). Jo. Jon. You can change the colours of this frame in PowerPoint.. Just pop the picture behind the frame. Rounded corners (Vector). Jo. Jon. Chapter 15. Above: GPS time series from southern California after removing several curve fits to the data. Curve Fitting in Earth Sciences. Fitting curves to data is very common in Earth sciences. Has applications in virtually all subdiscipline. Jake Blanchard. University of . Wisconsin - Madison. Spring . 2008. Introduction. If we have some data for an uncertain input parameter, we need to decide what form of distribution to use as a model and then find a way to fit the model to the data.. Presented By: Donna Petiford, Missouri PTA (Past President). Team Building Activity. Make a list of things that you have in common with those at your table. . What . are the essentials of an effective team?. Akshay Asthana, Jason Saragih, Michael Wagner and Roland G. öcke. ANU, CMU & U Canberra. In part funded by ARC grant TS0669874 . Background. Thinking Head project. http://thinkinghead.edu.au/. 5-year multi-institution (Canberra, UWS, Macquarie, Flinders) project in Australia. a . tyre . onto a wheel. Following simple instructions for correct fitting and user safety. June 2014. N° 9. PRECAUTIONS BEFORE FITTING:. • . Check that the wheel and its components are in good condition. The wheel rim must be . Formed mysterious cracks at sea. De Havilland Comet, world’s first commercial jetliner (1950s)…. De Havilland Comet, world’s first commercial jetliner (1950s)… In 1954, two mysteriously broke apart in mid-air, killing dozens and bankrupting the company.. Jai Haridas. Senior Development Lead. Microsoft Corporation. COS304. Agenda. Windows . Azure Storage. Blobs. , . Drives, Tables. , Queues. . Partitioning & Scalability. Q&A. What is Windows Azure Storage?. 50466 Windows® Azure™ Solutions with Microsoft® Visual Studio® 2010. Windows Azure Storage Blobs. Blob storage provides a theoretically infinite space to store any type of data.. Blob is actually an acronym for . www.bureaukwiek.nl. 1. This side up. www.bureaukwiek.nl. 2. Fold diagonally first. www.bureaukwiek.nl. 3. Folded diagonals. www.bureaukwiek.nl. 4. www.bureaukwiek.nl. Fold the straight lines. 5. www.bureaukwiek.nl. Edges = jumps in brightness/color. Brightness jumps marked in white. Edges. Edges = jumps in brightness/color. Important!. Give object outlines and . shapes. Brightness jumps marked in white. Edges. Edges = jumps in brightness/color. Post . four pieces of paper in the four corners of the classroom. . Write . a controversial topic on the board (for example: Schools should eliminate report cards). . Have . students move to the corner that best matches their position (Strongly Agree, Somewhat Agree, Strongly Disagree, Somewhat Disagree). . With their years of experience and production level, they are the leading industries of best Stainless Steel Pipe Fitting Supplier and manufacturing too.
Download Document
Here is the link to download the presentation.
"Fitting Fitting We’ve learned how to detect edges, corners, blobs. Now what?"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents