
Objective Realtime terrain mapping and processingInnovation Leveraging a deep neural network model trained on the ground for realtime landing zone selectionImprovement beyond SOA 1 Incorporating ID: 862010
Download Pdf The PPT/PDF document "RESEARCH OBJECTIVES" is the property of its rightful owner. Permission is granted to download and print the materials on this web site for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.




1 RESEARCH OBJECTIVES - Objective: Real -
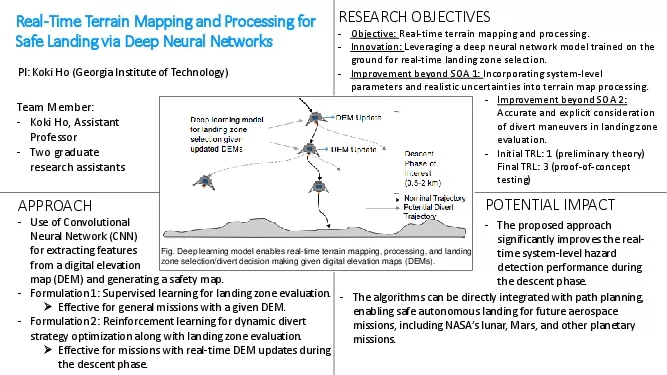
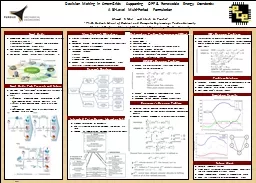
RESEARCH OBJECTIVES - Objective: Real - time terrain mapping and processing. - Innovation: Leveraging a deep neural network model trained on the ground for real - time landing zone selection. - Improvement beyond SOA 1: Incorporating system - level parameters and realistic uncertainties into terrain map processing. APPROACH POTENTIAL IMPACT - The proposed approach significantly improves the real - time system - level hazard detection performance during the descent phase. PI: Koki Ho (Georgia Institute of Technology) - Formulation 1: Supervised learning for landing zone evaluation. Effective for general missions with a given DEM. - Formulation 2: Reinforcement learning for dynamic divert strategy optimization along with landing zone evaluation. Effective for missions with real - time DEM updates during the descent phase. - Improvement beyond SOA 2: Accurate and explicit consideration of divert maneuvers in landing zone evaluation. - Initial TRL: 1 (preliminary theory) Final TRL: 3 (proof - of - concept testing) Real - Time Terrain Mapping and Processing for Safe Landing via Deep Neural Networks - Use of Convolutional Neural Network (CNN) for extracting features from a digital elevation map - The algorithms can be directly integrated with path planning, enabling safe autonomous landing for future aerospace missions , including NASA’s lunar, Mars, and other planetary missions. (DEM) and generating a safety map. Team Member: - Koki Ho, Assistant Professor - Two graduate research assistants Fig. Deep learning model enables real - time terrain mapping, processing, and landing zone selection/divert decision making given digital elevation maps (DEMs).