
Motivation and IntroductionHow to employ data for optimal control Plant DisturbanceInputController CostsConstraints State 149ModelFree RL simultaneously parameterize Poor data efficiencyDynamic ID: 827601
Download Pdf The PPT/PDF document "Optimal Control via Neural Networks:A Co..." is the property of its rightful owner. Permission is granted to download and print the materials on this web site for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.



Optimal Control via Neural Networks:A Co
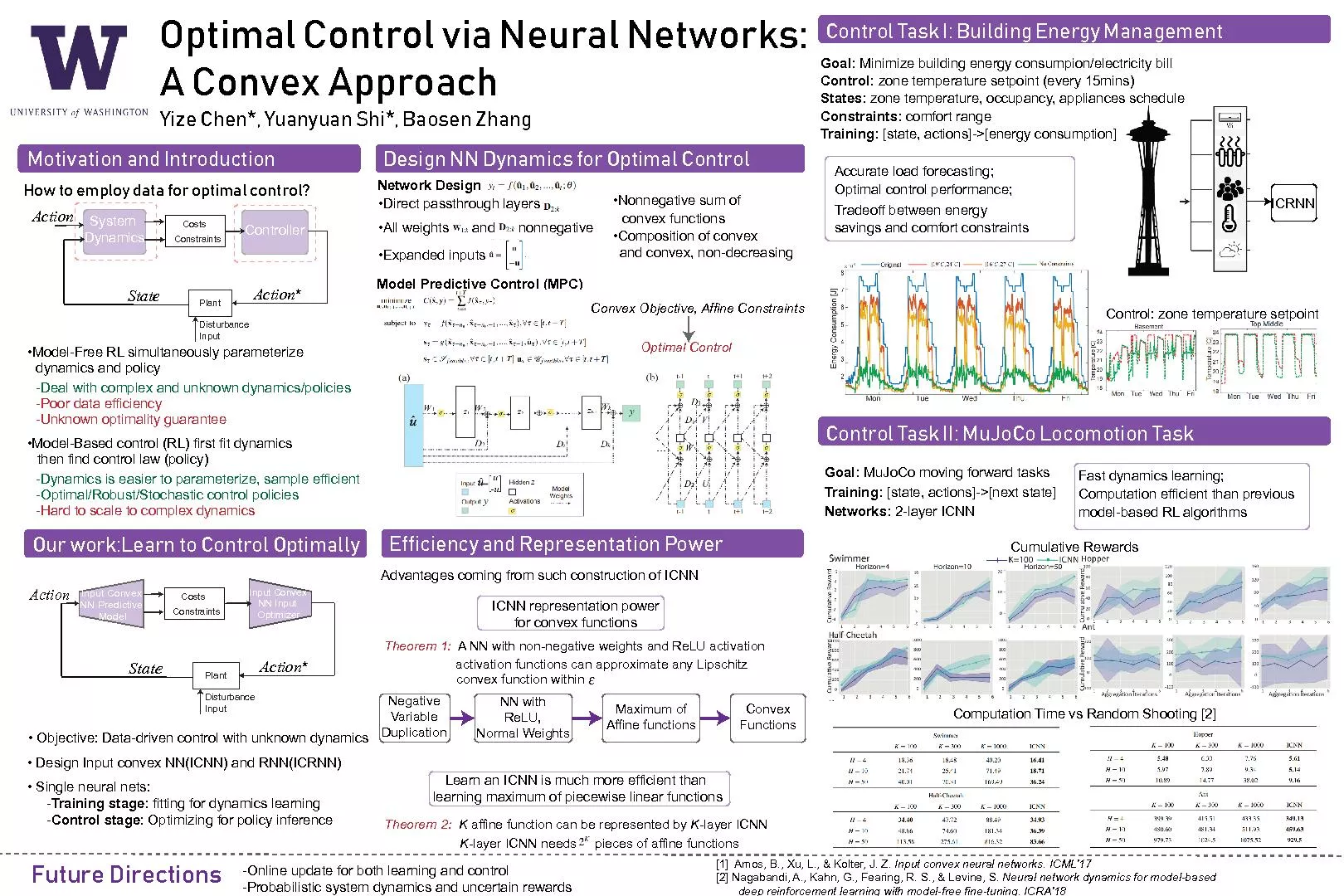
Optimal Control via Neural Networks:A Convex ApproachYize Chen*, Yuanyuan Shi*, Baosen Zhang Motivation and IntroductionHow to employ data for optimal control?PlantDisturbanceInputControllerCostsConstraints State•Model-Free RL simultaneously parameterize -Poor data efficiency-Dynamics is easier to parameterize, sample efficientOur work:Learn to Control OptimallyInput Convex NN Predictive ModelInput Convex NN Input OptimizerPlantDisturbanceInputStateAction*ActionCostsConstraints Training stageDesign NN Dynamics for Optimal ControlControl Task I: Building Energy ManagementFuture DirectionsControl Task II: MuJoCo Locomotion Task-Probabilistic system dynamics and uncertain rewards[1] Amos, B., Xu, L., & Kolter, J. Z. Input convex neural networks. ICML’17[2] Nagabandi, A., Kahn, G., Fearing, R. S., & Levine, S. deep reinforcement learning with model-free fine-tuning. ICRA’18Efficiency and Representation PowerAdvantages coming from such construction of ICNNNetwork Design•Direct passthrough layers •All weights and nonnegative •Expanded inputs •Nonnegative sum of •Composition of convex and convex, non-decreasing convex functionsModel Predictive Control (MPC) Convex Objective, Affine Constraints A NN with non-negative weights and ReLU activationVariableNormal WeightsAffine functionsConvexFunctions affine function can be represented by Learn an ICNN is much more efficient than -layer ICNN needs pieces of affine functionsICNN representation powerfor convex functionsICRNNTradeoffTraining: �raining: Networks: 2-layer ICNNGoal: Minimize building energy consumpion/electricity billControl: zone temperature setpoint (every 15mins)States: zone temperature, occupancy, appliances scheduleTraining:�raining: Cumulative RewardsComputation Time vs Random Shooting [2]Computation efficient than previousmodel-based RL algorithmsControl: zone temperature setpoint