

Objectives Study the basic components of an optimization problem Formulation of design problems as mathematical programming problems Define stationary points Necessary and sufficient conditions for the relative maximum of a function of a single variable and for a function of two variab ID: 1026061
Download Presentation The PPT/PDF document "OPTIMIZATION TECHNIQUES Objective Functi..." is the property of its rightful owner. Permission is granted to download and print the materials on this web site for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.


1. OPTIMIZATION TECHNIQUES
2. Objective Function, Maxima, Minima and Saddle Points, Convexity and Concavity
3. ObjectivesStudy the basic components of an optimization problem.Formulation of design problems as mathematical programming problems. Define stationary points Necessary and sufficient conditions for the relative maximum of a function of a single variable and for a function of two variables. Define the global optimum in comparison to the relative or local optimumDetermine the convexity or concavity of functions3
4. Introduction - PreliminariesBasic components of an optimization problem :An objective function expresses the main aim of the model which is either to be minimized or maximized. Set of unknowns or variables which control the value of the objective function. Set of constraints that allow the unknowns to take on certain values but exclude others. Optimization problem is then to: 4Find values of the variables that minimize or maximize the objective function while satisfying the constraints.
5. Objective Function Many optimization problems have a single objective functionThe two interesting exceptions are: No objective function: User does not particularly want to optimize anything so there is no reason to define an objective function. Usually called a feasibility problem. Multiple objective functions. In practice, problems with multiple objectives are reformulated as single-objective problems by either forming a weighted combination of the different objectives or by treating some of the objectives by constraints. 5
6. Statement of an optimization problemTo find X = which maximizes f(X) Subject to the constraints gi(X) <= 0 , i = 1, 2,….,mlj(X) = 0 , j = 1, 2,….,p6
7. Statement of an optimization problem…whereX is an n-dimensional vector called the design vector f(X) is called the objective function gi(X) and lj(X) are inequality and equality constraints, respectively. This type of problem is called a constrained optimization problem.Optimization problems can be defined without any constraints as well Unconstrained optimization problems.7
8. Objective Function SurfaceIf the locus of all points satisfying f(X) = a constant c is considered, it can form a family of surfaces in the design space called the objective function surfaces. When drawn with the constraint surfaces as shown in the figure we can identify the optimum point (maxima). Possible graphically only when the number of design variable is two. When we have three or more design variables because of complexity in the objective function surface we have to solve the problem as a mathematical problem and this visualization is not possible. 8
9. Objective function surfaces to find the optimum point (maxima)9
10. Variables and ConstraintsVariables These are essential. If there are no variables, we cannot define the objective function and the problem constraints. Constraints Even though constraints are not essential, it has been argued that almost all problems really do have constraints. In many practical problems, one cannot choose the design variable arbitrarily. Design constraints are restrictions that must be satisfied to produce an acceptable design. 10
11. Constraints (contd.)Constraints can be broadly classified as : Behavioral or Functional constraints : Represent limitations on the behavior and performance of the system. Geometric or Side constraints : Represent physical limitations on design variables such as availability, fabricability, and transportability.11
12. Constraint SurfacesConsider the optimization problem presented earlier with only inequality constraints gi(X) . Set of values of X that satisfy the equation gi(X) forms a boundary surface in the design space called a constraint surface. Constraint surface divides the design space into two regions: one with gi(X) < 0 (feasible region) and the other in which gi(X) > 0 (infeasible region). The points lying on the hyper surface will satisfy gi(X) =0. 12
13. The figure shows a hypothetical two-dimensional design space where the feasible region is denoted by hatched lines 13Behavior constraintg2 0.Infeasible regionFeasible region Behavior constraintg1 0Side constraintg3 ≥ 0Bound unacceptable point. Bound acceptable point. .Free acceptable pointFree unacceptable point
14. Stationary Points: Functions of Single and Two Variables14
15. Stationary pointsFor a continuous and differentiable function f(x) a stationary point x* is a point at which the function vanishes, i.e. f ’(x) = 0 at x = x*. x* belongs to its domain of definition. Stationary point may be a minimum, maximum or an inflection (saddle) point 15
16. Stationary points… (a) Inflection point (b) Minimum (c) Maximum
17. Relative and Global OptimumA function is said to have a relative or local minimum at x = x* if for all sufficiently small positive and negative values of h, i.e. in the near vicinity of the point x. A point x* is called a relative or local maximum if for all values of h sufficiently close to zero. A function is said to have a global or absolute minimum at x = x* if for all x in the domain over which f(x) is defined. A function is said to have a global or absolute maximum at x = x* if for all x in the domain over which f (x) is defined.17
18. Relative and Global Optimum…18ababxxf(x)f(x)......A1B1B2A3A2Relative minimum is also global optimumA1, A2, A3 = Relative maxima A2 = Global maximum B1, B2 = Relative minima B1 = Global minimum
19. Functions of a single variableConsider the function f(x) defined for To find the value of x* such that x* maximizes f(x) we need to solve a single-variable optimization problem. 19
20. Functions of a single variable …Necessary condition : For a single variable function f(x) defined for x which has a relative maximum at x = x* , x* if the derivative f ‘(x) = df(x)/dx exists as a finite number at x = x* then f ‘(x*) = 0. Above theorem holds good for relative minimum as well. Theorem only considers a domain where the function is continuous and derivative. It does not indicate the outcome if a maxima or minima exists at a point where the derivative fails to exist. This scenario is shown in the figure below, where the slopes m1 and m2 at the point of a maxima are unequal, hence cannot be found as depicted by the theorem. 20
21. Functions of a single variable ….21Salient features:Theorem does not consider if the maxima or minima occurs at the end point of the interval of definition. Theorem does not say that the function will have a maximum or minimum at every point where f ’(x) = 0, since this condition f ’(x) = 0 is for stationary points which include inflection points which do not mean a maxima or a minima.
22. Sufficient conditionFor the same function stated above let f ’(x*) = f ”(x*) = . . . = f (n-1)(x*) = 0, but f (n)(x*) ≠ 0, then it can be said that f (x*) is (a) a minimum value of f (x) if f (n)(x*) > 0 and n is even(b) a maximum value of f (x) if f (n)(x*) < 0 and n is even(c) neither a maximum or a minimum if n is odd 22
23. Example 1Find the optimum value of the function and also state if the function attains a maximum or aminimum. Solution For maxima or minima, or x* = -3/2 is positive . Hence the point x* = -3/2 is a point of minima and the function attains a minimum value of -29/4 at this point.23
24. Example 224Find the optimum value of the function and also state if the function attains a maximum or a minimum Solution: or x = x* = 2 for maxima or minima. at x* = 2 at x* = 2 at x* = 2Hence fn(x) is positive and n is even hence the point x = x* = 2 is a point of minimum and the function attains a minimum value of 0 at this point.More examples can be found in the lecture notes
25. Functions of two variables Concept discussed for one variable functions may be easily extended to functions of multiple variables. Functions of two variables are best illustrated by contour maps, analogous to geographical maps. 25A contour is a line representing a constant value of f(x) as shown in the following figure. From this we can identify maxima, minima and points of inflection. A contour plot
26. Necessary conditionsFrom the above contour map, perturbations from points of local minima in any direction result in an increase in the response function f(x), i.e. the slope of the function is zero at this point of local minima. Similarly, at maxima and points of inflection as the slope is zero, the first derivative of the function with respect to the variables are zero. Which gives us at the stationary points. i.e. the gradient vector of f(X), at X = X* = [x1 , x2] defined as follows, must equal zero:26
27. Sufficient conditionsConsider the following second order derivatives:Hessian matrix defined by H is formed using the above second order derivatives. 27
28. Sufficient conditions …The value of determinant of the H is calculated and if H is positive definite then the point X = [x1, x2] is a point of local minima.if H is negative definite then the point X = [x1, x2] is a point of local maxima.if H is neither then the point X = [x1, x2] is neither a point of maxima nor minima.28
29. Example Locate the stationary points of f(X) and classify them as relative maxima, relative minima or neither based on the rules discussed in the lecture. Solution
30. Example …30From , So the two stationary points are X1 = [-1,-3/2] and X2 = [3/2,-1/4]
31. Example …31The Hessian of f(X) is At X1 = [-1,-3/2] ,Since one eigen value is positive and one negative, X1 is neither a relative maximum nor a relative minimum
32. Example …At X2 = [3/2,-1/4]Since both the eigen values are positive, X2 is a local minimum. Minimum value of f(x) is -0.375 More examples can be found in the lecture notes
33. Convex and Concave Functions33
34. Convex Function (Function of one variable)A real-valued function f defined on an interval (or on any convex subset C of some vector space) is called convex, if for any two points x and y in its domain C and any t in [0,1], we haveA function is convex if and only if its epigraph (the set of points lying on or above the graph) is a convex set. A function is also said to be strictly convex if for any t in (0,1) and a line connecting any two points on the function lies completely above the function. 34
35. A convex function35
36. Testing for convexity of a single variable functionA function is convex if its slope is non decreasing or 0It is strictly convex if its slope is continually increasing or 0 throughout the function.36
37. Properties of convex functionsA convex function f, defined on some convex open interval C, is continuous on C and differentiable at all or at many points. If C is closed, then f may fail to be continuous at the end points of C.A continuous function on an interval C is convex if and only if for all a and b in C.A differentiable function of one variable is convex on an interval if and only if its derivative is monotonically non-decreasing on that interval.37
38. Properties of convex functions …A continuously differentiable function of one variable is convex on an interval if and only if the function lies above all of its tangents: for all a and b in the interval.A twice differentiable function of one variable is convex on an interval if and only if its second derivative is non-negative in that interval; this gives a practical test for convexity. A continuous, twice differentiable function of several variables is convex on a convex set if and only if its Hessian matrix is positive semi definite on the interior of the convex set.If two functions f and g are convex, then so is any weighted combination af + b g with non-negative coefficients a and b. Likewise, if f and g are convex, then the function max{f, g} is convex.38
39. Concave function (Function of one variable) A differentiable function f is concave on an interval if its derivative function f ′ is decreasing on that interval: a concave function has a decreasing slope.A function f(x) is said to be concave on an interval if, for all a and b in that interval,Additionally, f(x) is strictly concave if39
40. A concave function40
41. Testing for concavity of a single variable functionA function is convex if its slope is non increasing or 0. It is strictly concave if its slope is continually decreasing or 0 throughout the function.41
42. Properties of concave functionsA continuous function on C is concave if and only if for any a and b in C.Equivalently, f(x) is concave on [a, b] if and only if the function −f(x) is convex on every subinterval of [a, b].If f(x) is twice-differentiable, then f(x) is concave if and only if f ′′(x) is non-positive. If its second derivative is negative then it is strictly concave, but the opposite is not true, as shown by f(x) = -x4.42
43. ExampleLocate the stationary points of and find out if the function is convex, concave or neither at the points of optima based on the testing rules discussed above.Solution:Consider the point x = x* = 0 at x * = 0 at x * = 0 43
44. Example …44Since the third derivative is non-zero, x = x* = 0 is neither a point of maximum or minimum , but it is a point of inflection. Hence the function is neither convex nor concave at this point. Consider the point x = x* = 1 at x * = 1 Since the second derivative is negative, the point x = x* = 1 is a point of local maxima with a maximum value of f(x) = 12 – 45 + 40 +5 = 12. At the point the function is concave since
45. Example …45Consider the point x = x* = 2 at x * = 2 Since the second derivative is positive, the point x = x* = 2 is a point of local minima with a minimum value of f(x) = -11. At the point the function is concave since
46. Functions of two variablesA function of two variables, f(X) where X is a vector = [x1,x2], is strictly convex if where X1 and X2 are points located by the coordinates given in their respective vectors. Similarly a two variable function is strictly concave if 46
47. Contour plot of a convex function 47
48. Contour plot of a concave function 48
49. Sufficient conditionsTo determine convexity or concavity of a function of multiple variables, the eigen values of its Hessian matrix is examined and the following rules apply.If all eigen values of the Hessian are positive the function is strictly convex.If all eigen values of the Hessian are negative the function is strictly concave.If some eigen values are positive and some are negative, or if some are zero, the function is neither strictly concave nor strictly convex. 49
50. ExampleLocate the stationary points of and find out if the function is convex, concave or neither at the points of optima based on the rules discussed in this lecture. Solution:Solving the above the two stationary points are X1 = [-1,-3/2] and X2 = [3/2,-1/4]
51. Example…
52. Example…Since one eigen value is positive and one negative, X1 is neither a relative maximum nor a relative minimum. Hence at X1 the function is neither convex nor concave.At X2 = [3/2,-1/4]Since both the eigen values are positive, X2 is a local minimumFunction is convex at this point as both the eigen values are positive.
53. Lagrange Multipliers and Kuhn-tucker Conditions
54. Objectives54To study the optimization with multiple decision variables and equality constraint : Lagrange Multipliers.To study the optimization with multiple decision variables and inequality constraint : Kuhn-Tucker (KT) conditions
55. Constrained optimization with equality constraints55A function of multiple variables, f(x), is to be optimized subject to one or more equality constraints of many variables. These equality constraints, gj(x), may or may not be linear. The problem statement is as follows:Maximize (or minimize) f(X), subject to gj(X) = 0, j = 1, 2, … , m where (1)
56. Constrained optimization…With the condition that ; or else if m > n then the problem becomes an over defined one and there will be no solution. Of the many available methods, the method of constrained variation and the method of using Lagrange multipliers are discussed.
57. Solution by method of Lagrange multipliers57Continuing with the same specific case of the optimization problem with n = 2 and m = 1 we define a quantity λ, called the Lagrange multiplier as (2)Using this in the constrained variation of f [ given in the previous lecture] And (2) written as (3) (4)
58. Solution by method of Lagrange multipliers…58Also, the constraint equation has to be satisfied at the extreme point (5)Hence equations (2) to (5) represent the necessary conditions for the point [x1*, x2*] to be an extreme point. λ could be expressed in terms of as well has to be non-zero. These necessary conditions require that at least one of the partial derivatives of g(x1 , x2) be non-zero at an extreme point.
59. 59The conditions given by equations (2) to (5) can also be generated by constructing a functions L, known as the Lagrangian function, as (6)Alternatively, treating L as a function of x1,x2 and , the necessary conditions for its extremum are given by (7)Solution by method of Lagrange multipliers…
60. Necessary conditions for a general problem60For a general problem with n variables and m equality constraints the problem is defined as shown earlier Maximize (or minimize) f(X), subject to gj(X) = 0, j = 1, 2, … , m where In this case the Lagrange function, L, will have one Lagrange multiplier j for each constraint as (8)
61. 61L is now a function of n + m unknowns, , and the necessary conditions for the problem defined above are given by (9)which represent n + m equations in terms of the n + m unknowns, xi and j. The solution to this set of equations gives us and (10)Necessary conditions for a general problem…
62. Sufficient conditions for a general problem62A sufficient condition for f(X) to have a relative minimum at X* is that each root of the polynomial in Є, defined by the following determinant equation be positive. (11)
63. 63where (12)Similarly, a sufficient condition for f(X) to have a relative maximum at X* is that each root of the polynomial in Є, defined by equation (11) be negative. If equation (11), on solving yields roots, some of which are positive and others negative, then the point X* is neither a maximum nor a minimum. Sufficient conditions for a general problem…
64. Example64Minimize , Subject to Solution with n = 2 and m = 1 L = or
65. Example…65Hence,
66. Example…66The determinant becomesor Since is negative, X*, correspond to a maximum
67. Kuhn – Tucker Conditions 67KT condition: Both necessary and sufficient if the objective function is concave and each constraint is linear or each constraint function is concave, i.e., the problems belongs to a class called the convex programming problems.
68. Kuhn-Tucker Conditions: Optimization ModelConsider the following optimization problem Minimize f(X)subject to gj(X) ≤ 0 for j=1,2,…,pwhere the decision variable vector X=[x1,x2,…,xn]68
69. Kuhn-Tucker ConditionsKuhn-Tucker conditions for X* = [x1* , x2* , . . . xn*] to be a local minimum are69
70. Kuhn Tucker Conditions …In case of minimization problems, if the constraints are of the form gj(X) ≥ 0, then λj have to be non-positiveIf the problem is one of maximization with the constraints in the form gj(X) ≥ 0, then λj have to be nonnegative. 70
71. Example 171Minimizesubject to
72. 72Kuhn – Tucker ConditionsExample 1…
73. From (17) either = 0 or , Case 1: = 0From (14), (15) and (16) we have x1 = x2 = and x3 = Using these in (18) we get From (22), , therefore, =0, Therefore, X* = [ 0, 0, 0 ]This solution set satisfies all of (18) to (21)Example 1…73
74. Case 2:Using (14), (15) and (16), we have orBut conditions (21) and (22) give us and simultaneously, which cannot be possible with Hence the solution set for this optimization problem is X* = [ 0 0 0 ]Example 1…74
75. Minimizesubject to Example 275
76. Kuhn – Tucker ConditionsExample 2…76
77. From (25) either = 0 or , Case 1From (23) and (24) we have and Using these in (26) we get Considering , X* = [ 30, 0]. But this solution set violates (27) and (28)For , X* = [ 45, 75]. But this solution set violates (27) Example 2…77
78. Case 2:Using in (23) and (24), we have Substitute (31) in (26), we haveFor this to be true, either Example 2…78
79. For , This solution set violates (27) and (28)For , This solution set is satisfying all equations from (27) to (31) and hence the desiredThus, the solution set for this optimization problem is X* = [ 80, 40 ]Example 2…79
80. BIBLIOGRAPHY / FURTHER READINGRao S.S., Engineering Optimization – Theory and Practice, Fourth Edition, John Wiley and Sons, 2009.Ravindran A., D.T. Phillips and J.J. Solberg, Operations Research – Principles and Practice, John Wiley & Sons, New York, 2001.Taha H.A., Operations Research – An Introduction, 8th edition, Pearson Education India, 2008.Vedula S., and P.P. Mujumdar, Water Resources Systems: Modelling Techniques and Analysis, Tata McGraw Hill, New Delhi, 2005.80
81. (ii) Constrained and Unconstrained Optimization
82. Objectives82To study the optimization of functions of multiple variables without optimization. To study the above with the aid of the gradient vector and the Hessian matrix. To discuss the implementation of the technique through examplesTo study the optimization of functions of multiple variables subjected to equality constraints using the method of constrained variation
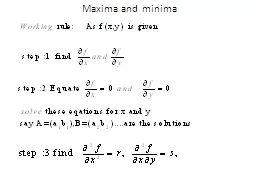
83. Unconstrained optimization83If a convex function is to be minimized, the stationary point is the global minimum and analysis is relatively straightforwardA similar situation exists for maximizing a concave variable function. Necessary and sufficient conditions for the optimization of unconstrained function of several variables
84. Necessary condition84In case of multivariable functions a necessary condition for a stationary point of the function f(X) is that each partial derivative is equal to zero. Each element of the gradient vector defined below must be equal to zero. i.e. the gradient vector of f(X), at X=X*, defined as follows, must be equal to zero:
85. Sufficient condition85For a stationary point X* to be an extreme point, the matrix of second partial derivatives (Hessian matrix) of f(X) evaluated at X* must be:positive definite when X* is a point of relative minimum, andnegative definite when X* is a relative maximum point. When all eigen values are negative for all possible values of X, then X* is a global maximum, and when all eigen values are positive for all possible values of X, then X* is a global minimum.If some of the eigen values of the Hessian at X* are positive and some negative, or if some are zero, the stationary point, X*, is neither a local maximum nor a local minimum.
86. Example86 Analyze the function and classify the stationary points as maxima, minima and points of inflection Solution
87. Example …87 Solving these simultaneous equations we get X*=[1/2, 1/2, -2]
88. 88Hessian of f(X) is Example …
89. 89or Since all eigen values are negative the function attains a maximum at the point X*=[1/2, 1/2, -2]or Example …
90. Constrained optimization90 A function of multiple variables, f(x), is to be optimized subject to one or more equality constraints of many variables. These equality constraints, gj(x), may or may not be linear. The problem statement is as follows: Maximize (or minimize) f(X), subject to gj(X) = 0, j = 1, 2, … , m where
91. 91With the condition that ; or else if m > n then the problem becomes an over defined one and there will be no solution. Of the many available methods, the method of constrained variation is discussed Another method using Lagrange multipliers will be discussed in the next lecture.Constrained optimization…
92. Solution by Method of Constrained Variation92For the optimization problem defined above, consider a specific case with n = 2 and m = 1The problem statement is as follows:Minimize f(x1,x2), subject to g(x1,x2) = 0For f(x1,x2) to have a minimum at a point X* = [x1*,x2*], a necessary condition is that the total derivative of f(x1,x2) must be zero at [x1*,x2*]. (1)
93. Method of Constrained Variation…93Since g(x1*,x2*) = 0 at the minimum point, variations dx1 and dx2 about the point [x1*, x2*] must be admissible variations, i.e. the point lies on the constraint: g(x1* + dx1 , x2* + dx2) = 0 (2) assuming dx1 and dx2 are small the Taylor’s series expansion of this gives us (3)
94. 94or at [x1*,x2*] (4) which is the condition that must be satisfied for all admissiblevariations. Assuming , (4) can be rewritten as (5) Method of Constrained Variation…
95. 95 (5) indicates that once variation along x1 (dx1) is chosen arbitrarily, the variation along x2 (dx2) is decided automatically to satisfy the condition for the admissible variation. Substituting equation (5) in (1) we have: (6) The equation on the left hand side is called the constrained variation of f. Equation (5) has to be satisfied for all dx1, hence we have (7) This gives us the necessary condition to have [x1*, x2*] as an extreme point (maximum or minimum)Method of Constrained Variation…
96.