PPT-
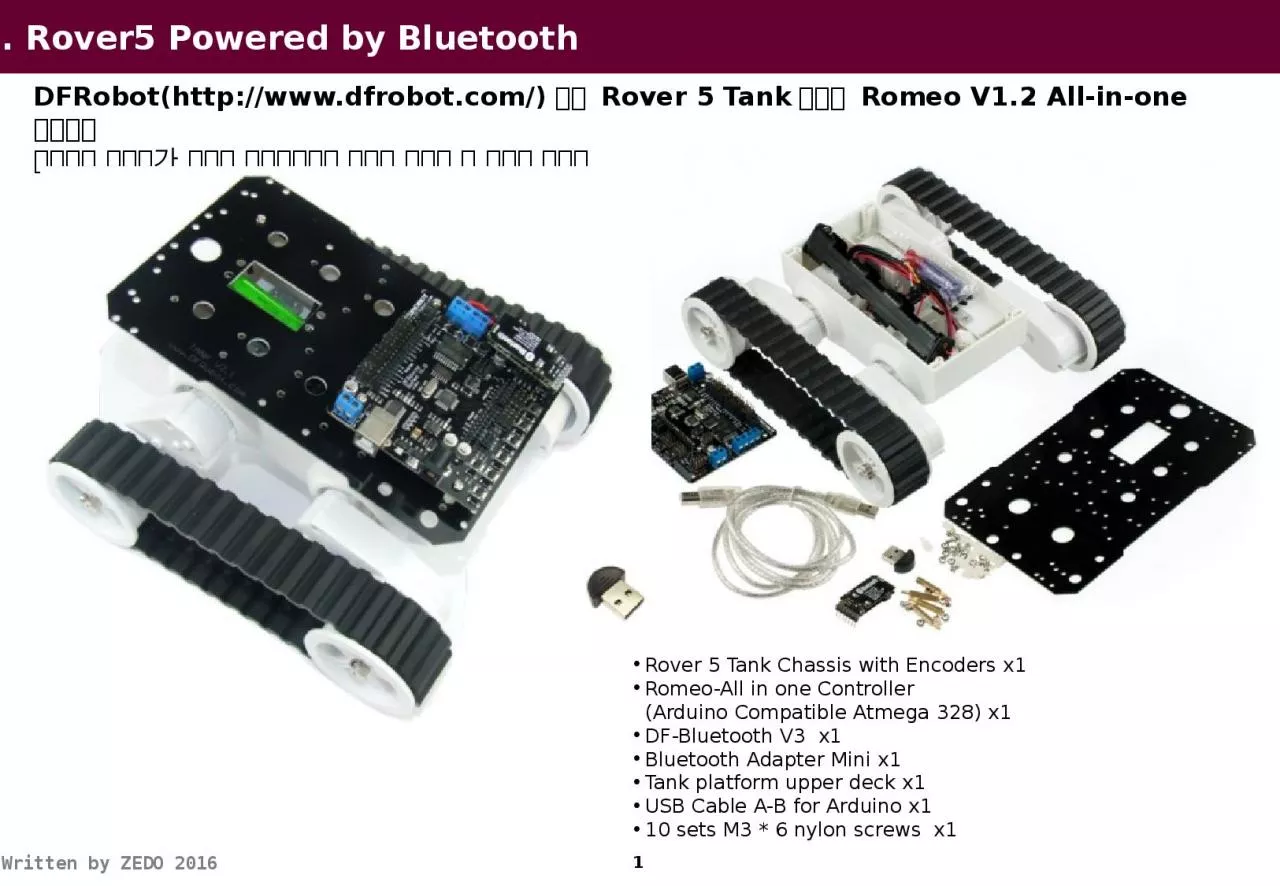
DFRobot httpwwwdfrobotcom 에서 Rover 5 Tank 기반에 Romeo V12 Allinone 컨트롤러 사용하여 사용자가 다양한 컨스터마이징 작업을 수행할
Download Presentation
"" is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.