PDF-Design of digital control systems with dead beat response
Author : marina-yarberry | Published Date : 2017-04-03
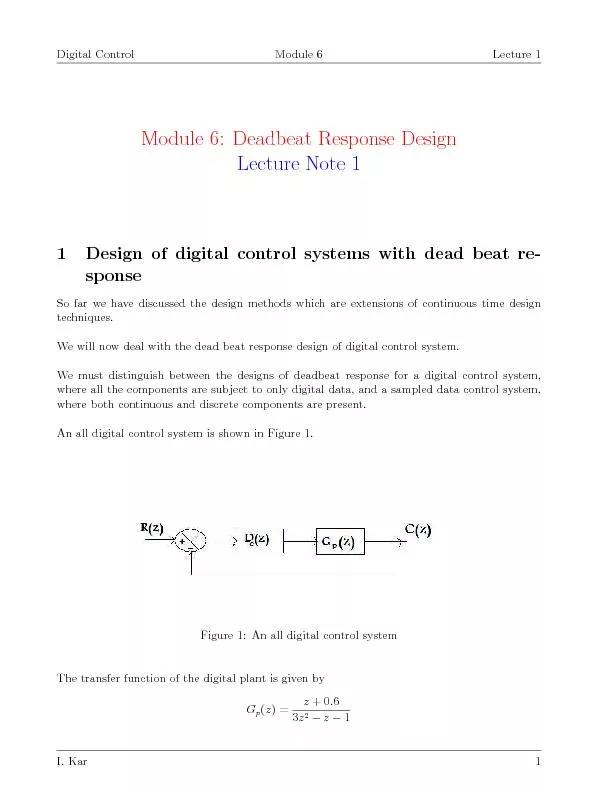
Module6DeadbeatResponseDesign LectureNote1 1DesignofdigitalcontrolsystemswithdeadbeatresponseSofarwehavediscussedthedesignmethodswhichareextensionsofcontinuoustimedesigntechniquesWewillnowdealwitht
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Design of digital control systems with d..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Design of digital control systems with dead beat response: Transcript
Module6DeadbeatResponseDesign LectureNote1 1DesignofdigitalcontrolsystemswithdeadbeatresponseSofarwehavediscussedthedesignmethodswhichareextensionsofcontinuoustimedesigntechniquesWewillnowdealwitht. We have no digital cable boxes that will work on digital cable tv No digital cable box is available Digital cable descrambler and digital cable box will be available someday At this time no digital cable tv box is available Look for digital cable de Prufrock. ”. Comparative Analysis. A Comparative Analysis in Literature refers to a comparison of two different texts on the basis of plot, character, theme, etc. Examining two texts side by side is an important skill; it develops critical thinking skills on all levels. . English 42 – Dr. Karen Rose. “The Beat Generation” is a term that applies to a group of American poets and novelists of the 1950s and 1960s who rebelled against American culture and values. . They viewed the United States as conservative, imperial, and constrictive. . Subdivision – Dividing the large beat into the smaller beats within it.. Playing the pulse with no subdivision. Now hear the eighth note but still only play quarter notes. Now hear the 16. th. note subdivision but still only play quarter notes. Mike McEvoy, PhD, REMT-P, RN, CCRN. EMS Coordinator, Saratoga County, NY. EMS Director - NYS Association of Fire Chiefs. Professor Emeritus - Cardiothoracic Surgery, Albany Medical College. EMS Editor – Fire Engineering magazine. Mike McEvoy, PhD, NRP, RN, CCRN. EMS Coordinator, Saratoga County, . NY. Resuscitation Committee Chair – Albany Medical Center. EMS . Editor – Fire Engineering magazine. EMS Section Board Member – International Association . News Reporting and . Writing. 10. th. . Edition. 5 Principles for Reporters on a Beat. Some common beats reporters cover:. Local government. Police. Business. Sports. 5 Principles to Succeed as a Reporter:. Key messages about Digital Technologies. Digital Technologies is a new curriculum (F to 10). Digital Technologies is as much about using different ways of thinking as it is using different digital systems . Written by: . Karine. . Malki. . & . Marwan . Touma. Definition. . Waste effort on something when there is no chance of succeeding.. You beat a dead horse when you are trying to get an impossible goal, when you continue fighting a lost battle or keep arguing after a final decision has been made. A similar expression is to try to get water out of a dry well.. INTRODUCTION. Introduction. . What. is a . control. . system. ?. Objective:. To make the system OUTPUT and the desired REFERENCE as close as. . possible, i.e., to make the ERROR as . small as possible.. Akim. . Babenko. 2017 Helen Edwards summer intern. Kuban State University, Krasnodar, Russia. 24 August 2017. Final Report. Supervisors: . Joshua Einstein-Curtis,. Brian Chase, Ed Cullerton . AD / RF department / Low Level RF group . Making Music . Every place that you go, everybody you meet. Sings a different song to a different beat.. Don’t just go with the flow; . Get up out of your seat. And start moving to a different beat.. 101.1 The BEAT. is music intensive, with an aim to bring our audience back to a simpler time of youth, parties, friends, family and fun! The BEAT features the pioneers and pillars of Hip Hop music. The best Hip Hop over the last 30 years finally have a place to call home on the FM dial. . Memories Fall 2020 Overview ◼ Memory Classification ◼ Read - Only Memory (ROM) ◼ Types of ROM ◼ PROM, EPROM, E 2 PROM ◼ Flash ROMs (Compact Flash, Secure Digital, Memory Stick) ◼ Random Ac
Download Document
Here is the link to download the presentation.
"Design of digital control systems with dead beat response"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents