Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Carnegie-Document'
Carnegie-Document published presentations and documents on DocSlides.
Carnegie Mellon Carnegie Mellon p malloc p malloc p malloc freep p malloc Carnegie Mellon p malloc Carnegie Mellon free free malloc Carnegie Mellon Carnegie Mellon Carnegie Mellon Carnegie Mell
by tatiana-dople
scanfd val Carnegie Mellon return y Ax int mat...
Costeffective Outbreak Detection in Networks Jure Leskovec Carnegie Mellon University Andreas Krause Carnegie Mellon University Carlos Guestrin Carnegie Mellon University Christos Faloutsos Carnegie
by alida-meadow
We present a general methodology for near optimal...
Carnegie Mellon Machine-Level Programming II: Control
by leventiser
15. -. 213: . Introduction to Computer Systems. 6....
Carnegie Unit Information
by luanne-stotts
Carnegie Unit Information For Rising 9 th Grader...
Revisiting the Carnegie Unit
by test
Education Writer’s Association. May 2014. The B...
Carnegie Mellon
by debby-jeon
Midterm Review. 15-213: Introduction to Computer ...
1 Carnegie Mellon
by tatyana-admore
Stacks. 15-213: Introduction to Computer Systems....
Ensemble of ExemplarSVMs for Object Detection and Beyond Tomasz Malisiewicz Carnegie Mellon University Abhinav Gupta Carnegie Mellon University Alexei A
by lindy-dunigan
Efros Carnegie Mellon University Abstract This pa...
Datadriven Visual Similarity for Crossdomain Image Matching Abhinav Shrivastava Carnegie Mellon University Tomasz Malisiewicz MIT Abhinav Gupta Carnegie Mellon University Alexei A
by mitsue-stanley
Efros Carnegie Mellon University Figure 1 In this...
Carnegie Mellon
by alida-meadow
Floating Point. 15-213: Introduction to Computer ...
Carnegie Library of Pittsburgh - Main
by conchita-marotz
CLP – Main Collection Strengths. Heritage Colle...
Mt. Lebanon High School
by sherrill-nordquist
2013-2014. The Argumentative Essay. United States...
Carnegie Mellon
by sherrill-nordquist
Assembly and Bomb Lab. 15-213: Introduction to Co...
2015 carnegie endowment for international peace all right 344476
by giovanna-bartolotta
e Carnegie Moscow Center and the Carnegie Endowme...
1 Carnegie Mellon
by briana-ranney
Proxylab. and stuff. 15-213: Introduction to Com...
Carnegie Hubble
by olivia-moreira
Program. A mid-infrared recalibration of the extr...
Carnegie Mellon
by debby-jeon
Machine-Level Programming II: Control. 15. -. 213...
The Gilded Age : Captain of Industry
by jane-oiler
. or Robber Baron. What is a Robber Baron? . D....
Technology Innovation for Climate Mitigation and Its Relation to Government Policies
by cason
. . Edward S. Rubin. Carnegie Mellon University. ...
Plastic Deformation of Single Crystals
by summer
27-731. Texture, Microstructure & Anisotropy. ...
Anisotropic Elasticity 27-750
by SugarPlumFairy
Texture, Microstructure & Anisotropy. A.D. Rol...
Anisotropic Elasticity 27-731
by elysha
Texture, Microstructure & Anisotropy. Dr. Jera...
ResearchStatementDiyiYangCarnegieMellonUniversity
by violet
MyresearchbridgesSocialComputingandNaturalLanguage...
HADIFastDiameterEstimationandMininginMassiveGraphswithHadoopUKang3Char
by obrien
KeywordsdiametergraphhadoopSymbolDe2nitionGagraphn...
DynamicModelingandRecipeOptimizationofPolyetherPolyolProcessesFall2013
by miller
YisuNie(CarnegieMellonUniversity) EWOMeeting Septe...
CORRESPONDENCEthinktheyarebenefitingourpatientsandusaswellButasinear
by eleanor
CORRESPONDENCEAtpresent,wecanadvisevictimsthattheo...
1779 Massachusetts Avenue NW Washington DC 20036 Phone 20248376
by jalin
Whether the Iraqi constitution is approved or not ...
yibocao95@gmail.com
by winnie
YIBO CAO Email: | LinkedI n : https://www.linked...
IntroductionBackgroundandmotivation
by isabella2
ThecurrentstatusquoofbatchschedulingandoperationsI...
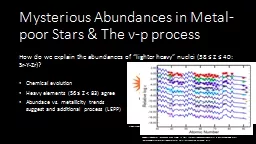
Mysterious Abundances in Metal-poor Stars & The
by frostedikea
ν. -p process. How do we explain the abundances o...
A Scorecard for Cyber Resilience: What We Have
by lois-ondreau
Observed. (Partial Version). Robert A. . Vrtis. ,...
Handouts 1-3 AMERICAN INDUSTRIALISTS: ROBBER BARONS OR CAPTAINS OF INDUSTRY?
by karlyn-bohler
. American . Industrialization. Outline. Indust...
Robber Barons or Captains of Industry?
by natalia-silvester
Today’s Objective . After today’s lesson, we ...
"Robber barons" or "captains of industry"?
by lois-ondreau
Bellwork. terms to define:. Robber Baron: an Ame...
The Rise of Big Business & Industry
by luanne-stotts
Postwar industrial expansion:. 1860—U.S. ranked...
Is big business good or bad for society?
by test
Is the advancement of technology good or bad for ...
Warm up – 1/30
by marina-yarberry
Please begin quietly working on the Philosophies ...
A shift occurred in
by marina-yarberry
american. society from the rural, agrarian, coun...
Industrial Growth and Systematic Management
by sherrill-nordquist
Chapter Six. Industrial Growth and Systematic Man...
Titans of Industry
by lindy-dunigan
Changes in Business. Vertical Integration. Contro...
Load More...