Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'damped'
damped published presentations and documents on DocSlides.
Lecture 23 Exemplary Inverse Problems
by briana-ranney
including. Earthquake Location. Syllabus. Lecture...
When and How Dynamic Hyporheic Temperature Mosaics Influenc
by marina-yarberry
S. Katie Fogg, Geoffrey C. Poole, Scott J. . O’...
Damped Oscillations
by kittie-lecroy
1. Forced oscillator with damping. . resistance ...
11-5 Damped Harmonic Motion
by celsa-spraggs
Typically, harmonic motion decreases in amplitude...
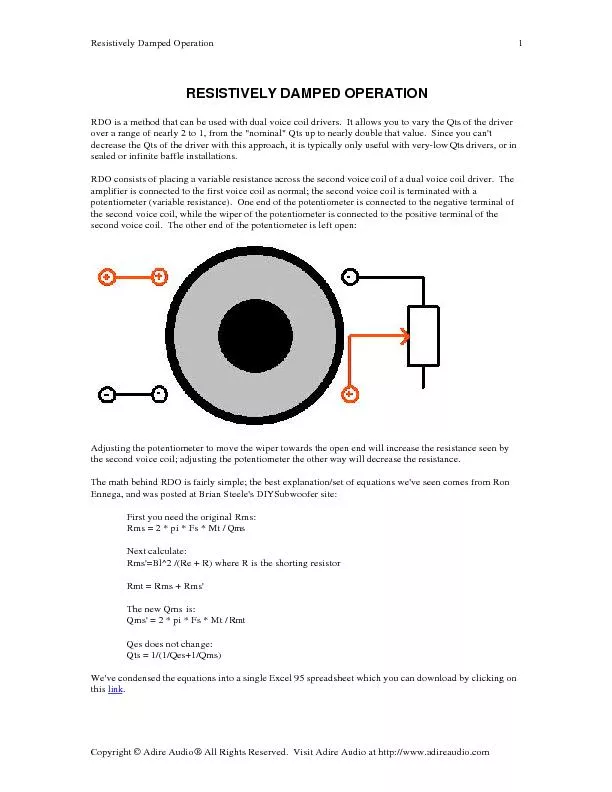
Resistively Damped Operation1Copyright
by luanne-stotts
Resistively Damped Operation2Copyright
Damping State what is meant by damping.
by tatiana-dople
Describe . examples of damped oscillations.. . N...
Passive Acoustic Radiators
by mitsue-stanley
Justin Yates, . Wittenberg University. Spring 201...
11-5 Damped Harmonic Motion
by phoebe-click
Typically, harmonic motion decreases in amplitude...
Introduction to Inverse Kinematics with Jacobian Transpose Pseudoinverse and Damped Least Squares methods Samuel R
by briana-ranney
Buss Department of Mathematics University of Cali...
Module Forced Vibration with Harmonic Excitation Undamped Systems and resonance Viscously Damped Systems Frequency Response Characteristics and Phase Lag Systems with Base Excitation Transmissibili
by lindy-dunigan
Lecture 22 Phase and Phasor representation Objec...
ALMOST CLASSICALLY DAMPED LINEAR DISCRETE SYSTEMS S
by tatyana-admore
Nalsiavas Associate Professor DcPameof of Mechani...
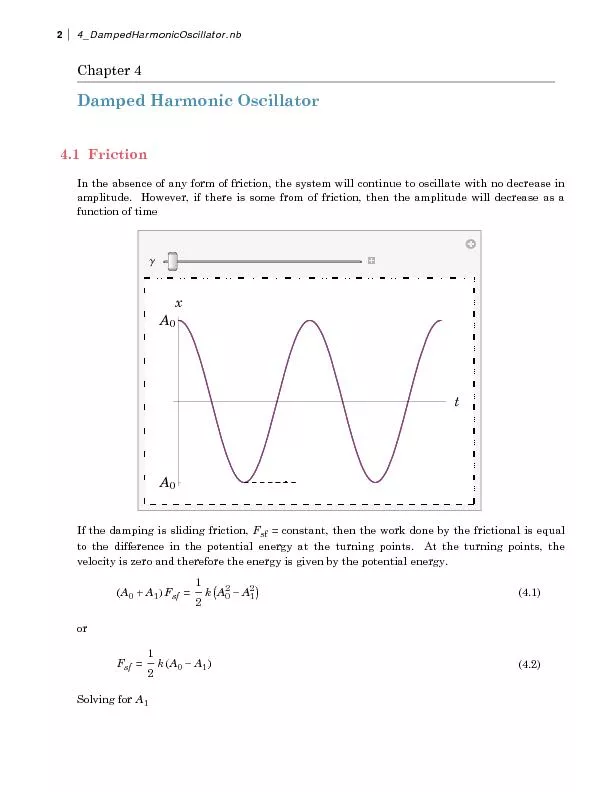
Damped Harmonic Oscillator4.1FrictionIn the absence of any form of fri
by alexa-scheidler
Chapter 4 A 0 A 0 x If the damping is sliding fric...
AOSC 634
by myesha-ticknor
Air Sampling and Analysis. Lecture 3. Measurement...
Sums and Differences of Sinusoids
by faustina-dinatale
Sec. . 4.6b. Exploration 1: Investigating Sinusoi...
Why the damped trend works
by mitsue-stanley
Eddie McKenzie ed@stams.strath.ac.uk Revised O...
Pendulums
by debby-jeon
and. Resonance. Lecture 3. Pre-reading. : . §14...
TOPIC OUTLINE
by myesha-ticknor
DAMPING TORQUE. Air Friction . Damping. Fluid Fri...
1 Unit 27
by lindy-dunigan
SRS Synthesis. 1. . Wavelets. 2. Damped Sinus...
Transient
by jane-oiler
Equation of motion. resistance force is proportio...
International Conference on Sustainable Built Environment
by danika-pritchard
NANCO AND UNIVERSITY OF MELBOURNE JOINT RESEARCH ...
Pendulums Pendulum – Any object free to move back and forth from a fixed point where the restorat
by debby-jeon
Period of a Pendulum: . Period based on length (L...
Lecture 24 Exemplary Inverse Problems
by phoebe-click
including. Vibrational. Problems. Syllabus. Lect...
Nextef results & status
by rosemary
International Workshop on Breakdown Science and Hi...
Loudspeaker Enclosures Loudspeaker Enclosures
by callie
How loudspeakers . work. Open-back . cabinet. Damp...
AOSC 634 Air Sampling and Analysis
by berey
Lecture 3. Measurement Theory. Performance Charact...
Topics for Today Third exam is Wednesday, April 20
by lydia
Third exam will cover chapters 11-15.. Damped . si...
PHY131H1F - Class 21 Today:
by miller
Today, finishing Chapter 13:. Simple Pendulum. Cir...
Fabrication of CLIC Accelerating
by elysha
Structures and . RF Components. On behalf of the X...
Load More...