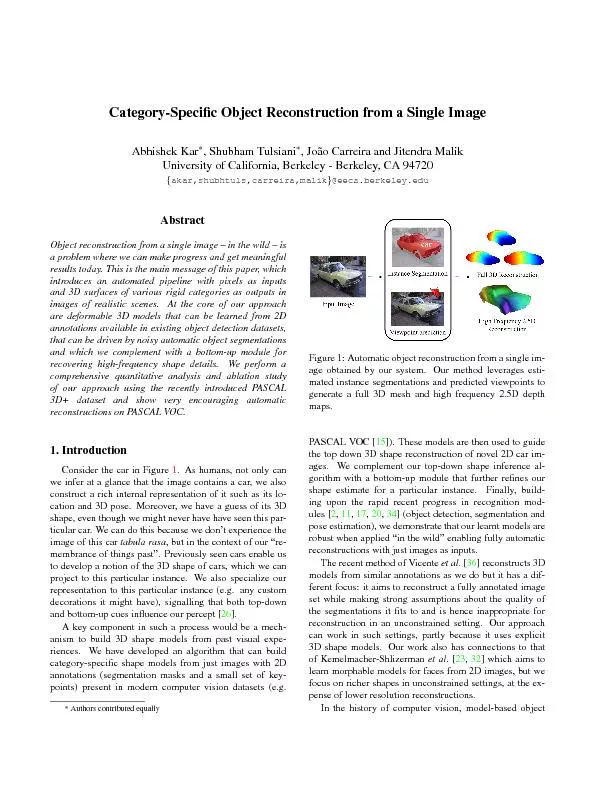
PDF-Here,Pnisthe2Dprojectionofthe3DshapeSnwithwhitenoiseNnandtherigidtrans
Author : yoshiko-marsland | Published Date : 2016-07-20
Figure3NRSfMviewpointestimationEstimatedviewpointsvisualizedusinga3Dcarwireframe223DBasisShapeModelLearningEquippedwithcameraprojectionparametersandkeypointcorrespondencesliftedto3DbyNRSfMont
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Here,Pnisthe2Dprojectionofthe3DshapeSnwi..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Here,Pnisthe2Dprojectionofthe3DshapeSnwithwhitenoiseNnandtherigidtrans: Transcript
Figure3NRSfMviewpointestimationEstimatedviewpointsvisualizedusinga3Dcarwireframe223DBasisShapeModelLearningEquippedwithcameraprojectionparametersandkeypointcorrespondencesliftedto3DbyNRSfMont. . Description ::. Prices ::. Recommendations ::. Precautions ::. Ingredi ents Secure & FAST Online ordering * Low Prices and Great Discounts * Without Prescription Free Consultation Fast & Guaranteed worldwide Delivery! Our Drugstore Is The Most Trusted Online Drug Supplier 24/7/365 Special Internet Prices (up to 80% off average US price) Fast And Discreet Shipping Worldwide 24/ Mike Dignam 573565783957486574865734757486 e here Lyrics You can rest your head upon my chest I feel warmer with you there 573545748957347574945748957347574935 Click here if you have a separate phone line dedicated to faxing Select the option that best describes your current phone line configuration Click Here to Restart Click here if you have an answering machine or a phone with a built in answering machi Here making each day of the year changing my life with a wave of her hand Nobody can de ny that theres something there There running my hands through her hair both of us thinking how Good it can be someone is speaking but she doesnt know hes there I All rights reserved 025 15 025 15 025 075 225 025 2625 125 0625 CD COVERS AND LABELS Overall CD cover deminsions 475 x 475 Do not place any copy in the image area of the CD cover CD Cover Typography CD Contents or Title 1620 pt Helvetica Bold limit e er 25 ea rs cc rk et ro exp er en ce a ra w rma cc es riv en ro ca es es eh e en es wel e r rin e e re e c er er e es e ro ra ry e et e exceed ed Nev er ef re em ca e He ro ca e Mo ro rid ro 02 9 N th re et en x eg rin e th 20 09 ro 9 10 11 00 e r Safety Maxiforce Air Lifting Bags are extremely tough made of Neoprene embedded with three 3 full layers of Aramid fiber reinforcement on each side giving the bags tremendous strength at full inflation Each Air Lifting Bag has been subjected to a st brPage 1br Here is some text to push the lines down Here is some text to push the lines down Here is some text to push the lines down Here is some text to push the lines down Here is some text t Attach Aft Deck here Aft DeckCopyright Accordion (horizontal) Cut out strips. Glue as indicat-ed. Fold like an accordion. Paste back of the last piece to your lapbook. Large Hexagon Accordion Cut out shapes on solid black lines. Fold on “The biblical revelation, which is the written Word of God, centers upon a God-given narrative of how successive and cumulative revelations of God's covenant purpose and provision were given and responded to at key points in history.. FOLD BACK HERE FOLD BACK HERE FOLD BACK HERE Montelena Estate Cabernet Sauvignon 4-up shelftalkers on 8.5"x11" paperTrim out to: 2.625"w x 6"h with fold at top for taping onto shelf display www.montel I Stand Here Ironing 293 1 was nineteen. It was the pre-relief, pre-WPAl world of the depression. I would start running as soon as 1got off the streetcar, running up the 294 Tillie Olsen seen it her Author, . B.A.. . Title. Department. Purpose. Insert here. More stuff here. Background. Add here. Variables and Instruments. Insert here. More stuff here. Analyses. Insert here. More stuff here. Procedures.
Download Document
Here is the link to download the presentation.
"Here,Pnisthe2Dprojectionofthe3DshapeSnwithwhitenoiseNnandtherigidtrans"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents