PPT-1 Monte-Carlo Planning: Policy Improvement
Author : aaron | Published Date : 2019-06-22
Alan Fern 2 MonteCarlo Planning Often a simulator of a planning domain is available or can be learned from data 2 Fire amp Emergency Response Conservation Planning
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "1 Monte-Carlo Planning: Policy Improveme..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
1 Monte-Carlo Planning: Policy Improvement: Transcript
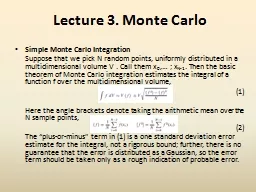
Alan Fern 2 MonteCarlo Planning Often a simulator of a planning domain is available or can be learned from data 2 Fire amp Emergency Response Conservation Planning 3 Large Worlds MonteCarlo Approach. X is a random vector in is a function from to and E Note that could represent the values of a stochastic process at di64256erent points in time For example might be the price of a particular stock at time and might be given by so then is the expe G.S. Karlovits, J.C. Adam, Washington State University. 2010 AGU Fall Meeting, San Francisco, CA. Outline. Climate change and uncertainty in the Pacific Northwest. Data, model and methods. Climate data. Steven . Gollmer. Cedarville University. Meet and Greet Game. Are there people here who share the same birthday?. Most births occur in September & October. October 5. th. is the most common birthday. 1. Authors: Yu . Rong. , . Xio. Wen, Hong Cheng. Word Wide Web Conference 2014. Presented by: Priagung . Khusumanegara. Table of Contents. Problems. Preliminary Concepts. Random Walk On Bipartite Graph. MWERA 2012. Emily A. Price, MS. Marsha Lewis, MPA . Dr. . Gordon P. Brooks. Objectives and/or Goals. Three main parts. Data generation in R. Basic Monte Carlo programming (e.g. loops). Running simulations (e.g., investigating Type I errors). (Monaco). Monte Carlo Timeline. 10 June 1215. Monaco is taken by the Genoese. 1489. The King of France, Charles VIII, and the Duke of Savoy recognize the sovereignty of Monaco . 1512. Louis XII, King of France, recognizes the independence of Monaco. SIMULATION. Simulation . of a process . – the examination . of any emulating process simpler than that under consideration. .. Examples:. System’s Simulation such as simulation of engineering systems, large organizational systems, and governmental systems. Simple Monte Carlo . Integration. Suppose . that we pick N random points, . uniformly . distributed in a . multidimensional volume . V . Call . them x. 0. ,… . ; . x. N-1. . Then the basic theorem of Monte . Imry. Rosenbaum. Jeremy . Staum. Outline. What is simulation . metamodeling. ?. Metamodeling. approaches. Why use function approximation?. Multilevel Monte Carlo. MLMC in . metamodeling. Simulation . Monte Carlo In A Nutshell. Using a large number of simulated trials in order to approximate a solution to a problem. Generating random numbers. Computer not required, though extremely helpful . A Brief History. Alan Fern . 2. Monte-Carlo Planning. Often a . simulator. of a planning domain is available. or can be learned from data. 2. Fire & Emergency Response. Conservation Planning. 3. Large Worlds: Monte-Carlo Approach. Jake Blanchard. Spring . 2010. Uncertainty Analysis for Engineers. 1. Monte Carlo Simulation in Excel. There are at least three ways to do MCS in Excel. Fill a bunch of cells with appropriate random numbers. 1WATER CLUSTERSZSZidi a SV Schevkunov ba Physics and Chemistry Dept Gabes preparatory institute ofengineers studies Rue OMAR IBNU ELKATTAB ZRIG GABES 6029Tunisiae-mail zidizblackcodemailcomb Physics a In of our series, where in the past we have discussed the ( i ) Black Scholes model and the (ii) Binomial option pricing model, we present the Monto Carlo simulation model to conclude our series on op
Download Rules Of Document
"1 Monte-Carlo Planning: Policy Improvement"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents