PPT-Tariq Ahamed
Author : myesha-ticknor | Published Date : 2016-06-11
Wavelet Neural Control Of Cascaded Continuous Stirred Tank Reactors AIM The main objective of the project is to control the concentration of reactant in the CSTR
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Tariq Ahamed" is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Tariq Ahamed: Transcript
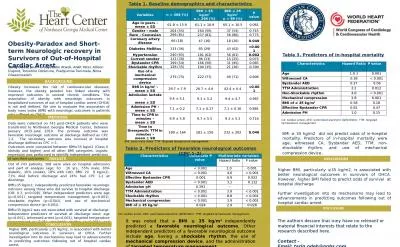
Wavelet Neural Control Of Cascaded Continuous Stirred Tank Reactors AIM The main objective of the project is to control the concentration of reactant in the CSTR The tank is controlled by manipulating the coolant flow rate. A L and Reyaz A L Department of Microbiology Sree Amman Arts and Scie nce College Erode638003 Department of Biotechnology Periyar University Sale m636011 Key words Phytochemical Bioactive substances Flavonoids Phenolic compounds Green tea How to Ci ISSN : 0975-9492 Vol 5 No 10 Oct 2014 733 734 735 736 Vol 5 No 10 Oct 2014 ISSN : 0975-9492 Dr. M.I. Niyas Ahamed et al./ International Journal of Pharma Sciences and Research (IJPSR) Reviews colourful chapter would attract thethe discipline. The book has veryinstitutional history to provide contextexplain human behaviour, institutions andthan through individual psychology. It Tari The greatest Quiz. Click when ready to . . read a bit about Get Up And Get Moving. Get Up And Get Moving is a campaign to help persuade people to get up and get active.. What is Get Up And Get Moving?. 1 2 Questions about this assessment tool? E-mail aging@slu.edu UK unrest 2. Look at the . consequences. of actions and how a . community. can be damaged.. Investigate . conflict. in . communities, . showing . sensitivity.. Consider how . diversity. groups in society can come together in the aftermath of a tragedy. . OVER VIEW. Collagen and . Elastin. are the examples of fibrous proteins. . These are basic structural elements.. These proteins have special mechanical properties.. They are found as components of skin, connective tissue, blood vessels, sclera and cornea of eye.. BIOCHEMISTRY. Basic Characteristics Of Cell Signaling . Cell must respond appropriately to external stimuli to survive.. Cells respond to stimuli via cell signaling. Each cell is programmed to respond to specific combinations of extracellular signal molecules. BIOCHEMISTRY. Basic Characteristics Of Cell Signaling . Cell must respond appropriately to external stimuli to survive.. Cells respond to stimuli via cell signaling. Each cell is programmed to respond to specific combinations of extracellular signal molecules. BIOCHEMISTRY. Urea is the major disposal form of amino groups derived from amino acids, and accounts for about 90% of the nitrogen-containing components of urine. One nitrogen of the urea molecule is supplied by free NH. Neuro-ophthalmology Department. Mayo Clinic, Rochester, MN. Neuro-ophthalmology UPFRONT cases series. May, 2021. Recurrent branch retinal artery occlusions. History. 27 . yo. male presents with left eye vision loss and was found to have a superior arcuate scotoma from a branch retinal artery occlusion (BRAO) by an outside provider.. Walking . Man. . By . Jonathan . Barofsky. . . Leopoldstrasse. Munich Germany. Prof. Tariq Waseem. Case 1. A 55 yrs old university professor has noticed chest tightness and heaviness while walking a distance of 300 meters from car parking to his department. The feeling is relieved if he stops midway for a while and does not occur at all when he walks in company of his colleagues or students. He felt similar chest congestion going uphill in Murree during last summer vacations. A friend suggested a pill to be kept in mouth while walking and he felt relieved.. Herbal Extracts in Cosmetic Use. Semester-1. Week number: 7. Date . : 28/11/2023. Outline. Herbals in skin care. Herba. l . Skin Care Products. Coconut Palm. Scientific name: Cocos nucifera L.. Family: . Ankit. Patel, Allison . Dupont. , Tomohiro . Oshimura. , . Pradyumna. . Tummala. , Nima Ghasemzadeh. Background. RESULTS. Data were collected on 743 post-OHCA patients who were transferred to Northeast Georgia Medical Center, between January 2015-June 2019. The primary outcome was favorable neurologic outcome at discharge defined as CPC 1-2. The secondary outcome was survival at hospital discharge defined as CPC < 5. .
Download Document
Here is the link to download the presentation.
"Tariq Ahamed"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents