PPT-Decidability /
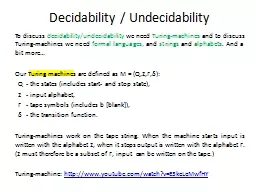
Undecidability To discuss decidability undecidability we need Turingmachines and to discuss Turingmachines we need formal languages and strings and alphabets And
Download Presentation
"Decidability /" is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.