PDF-Graphics Volume 18, Number 3 July 1984
Author : danika-pritchard | Published Date : 2015-11-18
Ray Tracing L Cook Thomas Porter Loren Carpenter Division Lucasfilm Ltd tracing is one of the most elegant techniques in com puter graphics Many phenomena that are
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "Graphics Volume 18, Number 3 July 1984" is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
Graphics Volume 18, Number 3 July 1984: Transcript
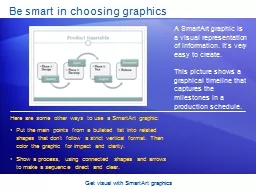
Ray Tracing L Cook Thomas Porter Loren Carpenter Division Lucasfilm Ltd tracing is one of the most elegant techniques in com puter graphics Many phenomena that are difficult or impossible with ot. Web Pages and Viewing Applets. What is an Applet?. An applet is a special Java program that can be included on a web page.. The inclusion of an applet would be written in the html file of the page.. Most applets are graphical in nature.. Be smart in choosing graphics. A SmartArt graphic is a visual representation of information. It’s very easy to create. . This picture shows a graphical timeline that captures the milestones in a production schedule. . A . WebGL. Game. With . Three.js. Interactive Computer Graphics. Chapter . 10 . - . 2. WebGL. Game: . Road Race!. Environment. Car model, smoke. Animation. Sounds. Collision detection. Keyboard input. Graphics Programming. Byung-Gook Lee. Dongseo Univ.. http://kowon.dongseo.ac.kr/~lbg/. Graphics Programming, Byung-Gook Lee, Dongseo Univ., E-mail:lbg@dongseo.ac.kr. Graphics Programming, Byung-Gook Lee, Dongseo Univ., E-mail:lbg@dongseo.ac.kr. Thomas Sangild Sørensen. Course overview. Department of Computer Science. Introduction . to computer graphics and image processing (Q1). Data-parallel computing (Q1). Advanced image processing (Q2). Windows 8 and your app. Shai Hinitz. Sr. Program Manager, Windows Games. 3-112. Windows 8 graphics overview. Graphics development language options. Migrating your graphics to WinRT. Case Study: Cat in the Hat by . HRP223 – 2009. November 16. th. , 2009 . Copyright © 1999-2009 Leland Stanford Junior University. All rights reserved.. Warning: This presentation is protected by copyright law and international treaties. Unauthorized reproduction of this presentation, or any portion of it, may result in severe civil and criminal penalties and will be prosecuted to maximum extent possible under the law.. Review. GLUT . Callback Functions. . 2. Angel: Interactive Computer Graphics 5E © Addison-Wesley 2009. Event Types. Window: resize, expose, iconify. Mouse: click one or more buttons. Motion: move mouse. Introduction. The language contains many sophisticated drawing capabilities as part of namespace . System.Drawing. . and the other namespaces that make up the .NET resource . GDI+. .. . GDI+. is an application programming interface (API) that provides classes for creating two-dimensional graphics, and manipulating fonts and images. . HRP223 – 2013. November 20, 2013 . Copyright © . 1999-2013 . Leland Stanford Junior University. All rights reserved.. Warning: This presentation is protected by copyright law and international treaties. Unauthorized reproduction of this presentation, or any portion of it, may result in severe civil and criminal penalties and will be prosecuted to maximum extent possible under the law.. Pre-Finals Lecture 2016-2017. 2 Types of Graphics. *. Bitmap . Graphics. *. Vector . Graphics. Bitmap Graphics. The most common and comprehensive form of storage for images on computers is bitmap image.. What You’ll see. Interactive. 3D computer graphics. Real-time. 2D, but mostly 3D. OpenGL. C/C (if you don’t know them). The math behind the scenes. Shaders. Simple and not-so-simple 3D file formats (OBJ and FBX). Born Eric Arthur Blair of a British colonial civil servant in India. Went to school in England. Once out of school he joined the Indian Imperial Police in Burma. He resigned from the police force in 1927 to become a writer. Window graphics are flexible and adaptable, making them ideal for firms that need to relocate. Hire Iris Signs for vinyl window graphics.
Download Document
Here is the link to download the presentation.
"Graphics Volume 18, Number 3 July 1984"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents