PDF-International Journal of Artificial Intelligence Appl
Author : liane-varnes | Published Date : 2015-06-18
2 No2 April 2011 DOI 105121ijaia20112207 90 PSRamaiah 1 Dept Of Computer Science And Systems Engineering Andhra University Visakhapatnam psramagmailcom MVenkateswara
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "International Journal of Artificial Inte..." is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
International Journal of Artificial Intelligence Appl: Transcript
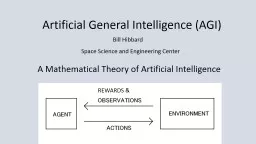
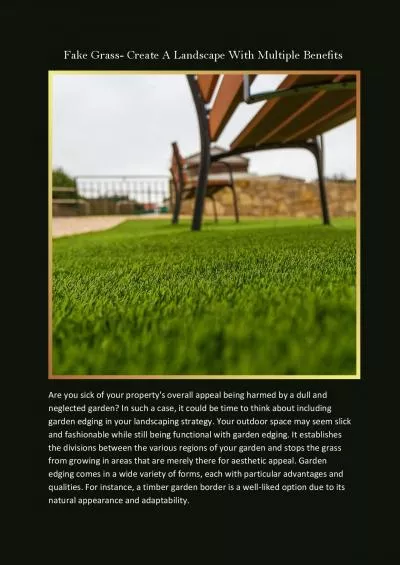
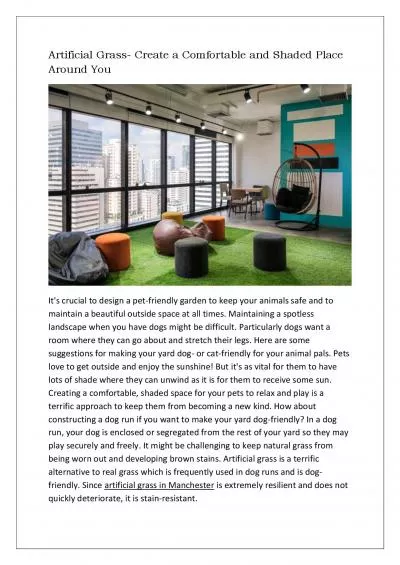
2 No2 April 2011 DOI 105121ijaia20112207 90 PSRamaiah 1 Dept Of Computer Science And Systems Engineering Andhra University Visakhapatnam psramagmailcom MVenkateswara Rao 2 Dept of Information Technology Gitam University R ushikondaVisakhapatnam ma. 4 No 4 July 2013 DOI 105121ijaia20134411 113 Usukhbayar Baldangombo Nyamjav Jambaljav and ShiJinn Horng 2 Department of Communication Technology School of I nformation Technology National University of Mongolia usukhbayar nyamjavnumedumn Departme 4 No 4 July 2013 DOI 105121ijaia20134403 21 Abhijit Chandra and Sudipta Chattopadhyay 2 Department of Electronics Telecommunication Engin eering Bengal Engineering and Science University Shibpur Howrah India abhijit922yahoocoin Department of Elect ICT Ethics Bigger Task 2. Aki Heikkinen. What is artificial . intelligence?. Artificial intelligence (AI) . is . an art . to duplicate human intelligence for . non-living devices [2].. Modern day artificial intelligence is collection of computation operations which makes a machine function toward a specific goal [1].. Jason Fuller. 1. What is Game AI?. Imitate intelligence in the actions of non-player characters (NPCs).. Make the game “feel” real.. Obey laws of the game. Show decision making . and planning. 2. Shuiwang. . Ji. General information. Instructor: . Shuiwang. . Ji. Office hours: Monday and Wednesday, 4:30PM-5:30PM, or by appointment. Office location: E&CS 3204. E-mail: . sji@cs.odu.edu. Research interests: machine learning, data mining, computer vision, computational biology. International Journal of Artificial Intelligence & Applications (IJAIA), Vol.2, No.2, April 2011 91 A robotic hand is an electro-mechanical system comprised of many parts. The two main parts to such a …and the mind-boggling stuff it can do. . THE MOST GENERAL DESCRIPTION OF AI. . A FANCY REPRESENTATION OF AI. FIRST PRINTING PRESS. FIRST AIRPLANE. LOOKING BACK IN TIME. Artificial Intelligence is a term coined by John McCarthy at the 1956 Dartmouth Conference.. Presented . by. :. . . Oliwual. . Islam. . . Vivek. . Mishra. . . Rahul. . Ravish. . Nick . Deheck. Chelsey . Eglseder. Joshua Lewis. David Summey. What is Artificial Intelligence? . Simulation of human intelligence. "Alexa"; "Watson. ". Machines learn from experience. Netflix. Ability to adjust to new inputs and perform human-like tasks. What impact might it have on how we work and live? What opportunities does it present for independent schools? . Understanding Artificial Intelligence. (AI). SAS.com. AI makes it possible for machines to learn from experience, adjust to new inputs, and perform human-like tasks.. 1. Artificial Intelligence. AI – is a field of learning that emulates human intelligence. Advances in human intelligence:. Machine intelligence has led to Robotics. Space exploration. Medicine. Advanced research . REWARDS & A Mathematical Theory of Artificial Intelligence Artificial General Intelligence (AGI) Space Science and Engineering Center Bill Hibbard AGENT ENVIRONMENT OBSERVATIONS Can the Agent Learn To Predict Observations? Are you sick of your property\'s overall appeal being harmed by a dull and neglected garden? In such a case, it could be time to think about including garden edging in your landscaping strategy. It\'s crucial to design a pet-friendly garden to keep your animals safe and to maintain a beautiful outside space at all times. Maintaining a spotless landscape when you have dogs might be difficult.
Download Document
Here is the link to download the presentation.
"International Journal of Artificial Intelligence Appl"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents