PDF-MT TUTORIAL ResolvertoDigital Converters by Walt Kester INTRODUCTION Machinetool and robotics manufacturers use reso lvers and synchros to provide accurate angular and rotational information
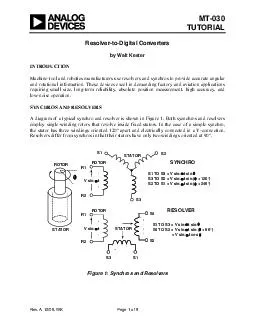
These devices excel in demanding factory and aviation applications requiring small size longterm reliability abso lute position measurement high accuracy and lownoise
Download Presentation
"MT TUTORIAL ResolvertoDigital Converters by Walt Kester INTR " is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.