PDF-Daredevil Ultrawideband radar sensing for small UGVs Brian Yamauchi iRobot Corporation South Avenue Burlington MA ABSTRACT We are developing an ultra wideband UWB radar sensor pa yload for the manp
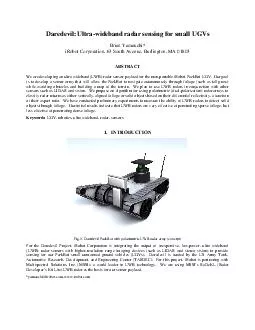
Our goal is to develop a sensor array that will allow the PackBot to navigate autonomously through foliage such as tall grass while avoiding obstacles and building
Download Presentation
"Daredevil Ultrawideband radar sensing for small UGVs Brian Y " is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.