Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robotics'
Robotics published presentations and documents on DocSlides.
Healthcare Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Healthcare Robotics Market Report published by val...
Home Care Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Home Care Robotics Market report provides the futu...
Exploring Educator Perceptions of Gender and Robotics
by deena
A case study of the I-SET Robotics, a community en...
Robotics Competition Turning PointAppendix E
by beatrice
vexrobotics.comCopyright 201, VEX Robotics Inc. 1 ...
Robotics Competition Turning PointAppendix E
by mila-milly
vexrobotics.comCopyright , VEX Robotics Inc.2018 1...
Trends in Teaching Robotics to UG/PG
by shangmaxi
Students. [. Teaching Robotics: 6 years]. [Total t...
Robotics Club Robotics Club, College of Engineering Adoor
by sportyinds
AIMS . OBJECTIVES. PAST EVENTS. PAST PROJECTS. EXI...
ROBOOTIKA http://www.scoop.it/t/robotics-by-liia-lees
by garboardcola
Liia Lees. TLÜ Haapsalu kolledž. 2014. Mis on RO...
ROBOOTIKA http://www.scoop.it/t/robotics-by-liia-lees
by carneos
Liia Lees. TLÜ Haapsalu kolledž. 2014. Mis on RO...
Robotics Engineers FUTURE JOBS READERS Level 1- ① Thinking about how to solve problems
by jane-oiler
Robotics Engineers FUTURE JOBS READERS Level 1- �...
The M.S . Degree in Robotics Engineering
by test
A multidisciplinary degree spanning Computer Scie...
JUNK DRAWER ROBOTICS Train the Trainer (TOT)
by celsa-spraggs
Junk Drawer Robotics – Curriculum Overview. Wha...
ROBOTICS Project by- V.Bindiya ,
by yoshiko-marsland
Narayana IIT Olympiad School. Robotics. Robotic ....
Apple P Robotics Introduction for New Recruits
by min-jolicoeur
9-12-18. Apple Pi Robotics. Agenda:. Introduction...
Embedded Programming and Robotics
by aaron
Introduction and Overview. Presented by. John Col...
CS491/691: Introduction to Aerial Robotics
by stefany-barnette
YOUR TEAM NAME. YOUR PROJECT NAME. Motivation and...
Robotics
by alexa-scheidler
with Parallax. Tommy Gober, MS. DIY. Who I am…....
NSF National Robotics Initiative:
by briana-ranney
Rapid exploration of robotic ankle exoskeleton c...
NEISD 2012 Robotics Showcase Webinar
by phoebe-click
Brought to you by:. Dave . Mullinix. . &. Ci...
ROBOTICS ENGINEERING CERTIFICATE Certification Exam
by certsgotlearning
#Certification #Dumps #Certification_exam_Dumps
(READ)-Behavior-Based Robotics (Intelligent Robotics and Autonomous Agents series)
by coyeyousuf_book
The Benefits of Reading Books,Most people read to ...
PEGACRSA80V1 : Certified Robotics System Architect (CRSA) 80V1
by Intrilogy
kindly visit us at www.examsdump.com. Prepare your...
PEGAPCRSA80V1_2019 : Pega Certified Robotics System Architect (PCRSA) 80V1 2019
by Intrilogy
kindly visit us at www.examsdump.com. Prepare your...
[PDF]-Hands-On Robotics Programming with C++: Leverage Raspberry Pi 3 and C++ libraries to build intelligent robotics applications
by ryekercooltan
The Desired Brand Effect Stand Out in a Saturated ...
PEGAPCRSA80V1_2019 PCRSA (Pega Certified Robotics System Architect) Certification Exam
by Empire
kindly visit us at www.nexancourse.com. Prepare yo...
PEGAPCRSA80V1_2019 PCRSA (Pega Certified Robotics System Architect) Certification Exam
by Empire
kindly visit us at www.nexancourse.com. Prepare yo...
[READ]-Hands-On Robotics Programming with C++: Leverage Raspberry Pi 3 and C++ libraries to build intelligent robotics applications
by zakariyasaurav
The Desired Brand Effect Stand Out in a Saturated ...
(READ)-Robot Ethics: The Ethical and Social Implications of Robotics (Intelligent Robotics and Autonomous Agents series)
by charlesettaangle
Robots today serve in many roles, from entertainer...
Thomas Edison State University TESU
by susan
Course Course TitleCourse Name Equivalent CodeCre...
Thomas Edison State UniversityOfficial Course Equivalency ListTESU mai
by phoebe
OnlineDegreecomCourseTESU EquivalencyNotesEV103 -E...
TUMO Tirana
by brianna
Robotics Workshop LeaderThe AlbanianAmerican Devel...
A short introduction
by wang
RoBi-X-We Createand CommercializeRobots1wwwblue-oc...
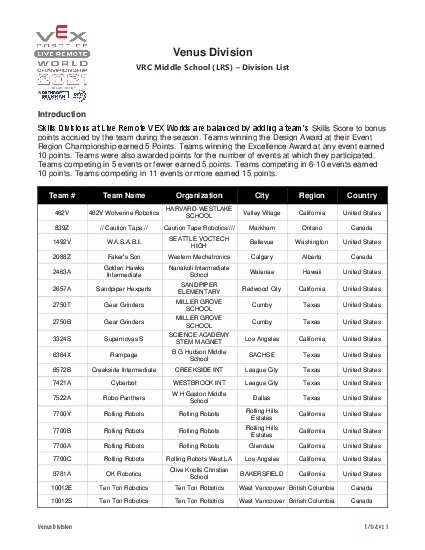
VRC Middle School LRS
by heavin
VenusDivisionDivision ListVenus Division5/13/2021I...
JIYI Robotics CO
by hailey
Ltd 1 K3 - A USER MANUAL Ver.1.0.6 Last updated :2...
jijo20etlgojp
by candy
Jijo-2 a a a 1 - - a diseases, a a a cial E...
Robotic as a Service
by joy
KUKA AG | Munz | 17.10.2017 | Page 2 www.kuka...
the ability to engage in group engineering and
by finley
1 problem-solving activities using fun and excitin...
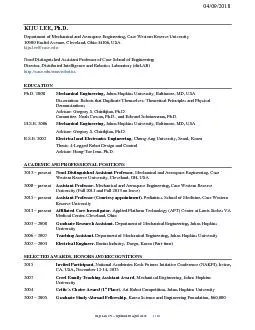
��Kiju Lee CV Updated onApril2018 | 14
by patchick
KIJU LEE, Ph.D. Department of Mechanical and Aeros...
Constrained Near-Optimal Control Using a Numerical Kinetic Solver
by warlikebikers
Alan L. Jennings & Ra. úl Ordóñez, . ajenni...
Fall 2019 Report Jose ‘
by chiquity
Pepe. ’ . L Contreras-Vidal, FIEEE. Cullen Disti...
Load More...








![[PDF]-Hands-On Robotics Programming with C++: Leverage Raspberry Pi 3 and C++ libraries to build intelligent robotics applications](https://thumbs.docslides.com/988316/pdf-hands-on-robotics-programming-with-c-leverage-raspberry-pi-3-and-c-libraries-to-build-intelligent-robotics-applications.jpg)


![[READ]-Hands-On Robotics Programming with C++: Leverage Raspberry Pi 3 and C++ libraries to build intelligent robotics applications](https://thumbs.docslides.com/979421/read-hands-on-robotics-programming-with-c-leverage-raspberry-pi-3-and-c-libraries-to-build-intelligent-robotics-applications.jpg)