Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robots-Robotics'
Robots-Robotics published presentations and documents on DocSlides.
Robotics Engineers FUTURE JOBS READERS Level 1- ① Thinking about how to solve problems
by jane-oiler
Robotics Engineers FUTURE JOBS READERS Level 1- �...
ROBOTICS Project by- V.Bindiya ,
by yoshiko-marsland
Narayana IIT Olympiad School. Robotics. Robotic ....
Mobile Robots Why do robots need to move?
by conchita-marotz
What defines a robot?. Sense. – a robot has to...
Robots in the Real World
by faustina-dinatale
Advanced Math and Science Academy. iRobot, UMass ...
Wendell Wallach: Ethics, Law, and the Governance of Robots
by sherrill-nordquist
J. Blackmon. Introduction. Alan Turing (1950) and...
WELDING ROBOTS
by debby-jeon
INTRODUCTION. . Robot Welding . is a process of...
Whisking with Robots – From Rat Vibrissae to
by giovanna-bartolotta
Biomimetic. Technology for Active Touch. Tony J....
Victor Marmol School of Computer Science
by tatiana-dople
Senior Thesis. Market-Based Coordination of Recha...
ODENSE
by phoebe-click
SILICON VALLEY. GEORGIA TECH. BOSTON. MÜNCHEN. T...
What is FIRST Robotics?
by natalia-silvester
FIRST Robotics Competition (FRC) . We were create...
COMP 2208
by tatyana-admore
Dr. Long Tran-Thanh. ltt08r@ecs.soton.ac.uk. Univ...
Robotics
by tawny-fly
Safety. Guohua. Cui, Dan Zhang and Marc A. Rosen...
SCHUNK Mechatronics & Modular Robotics
by min-jolicoeur
Dr. Roko Tschakarow. SCHUNK business units. Fac...
Victor
by test
Marmol. School of Computer Science. Senior Thesis...
Robotics Competition Turning PointAppendix E
by mila-milly
vexrobotics.comCopyright , VEX Robotics Inc.2018 1...
JUNK DRAWER ROBOTICS Train the Trainer (TOT)
by celsa-spraggs
Junk Drawer Robotics – Curriculum Overview. Wha...
Healthcare Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Healthcare Robotics Market Report published by val...
Home Care Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Home Care Robotics Market report provides the futu...
Acceptance and Gender Perceptions of Robots in a U.S. Context
by willow
Kate k. mays & . james. E. Katz. Division of ...
Robots By: Monét, Nitika, and Liz
by claire
What is a Robot??. A . robot. is a machine or...
Robots INST 4200 David J Stucki
by shoulderheinz
Spring 2015. Hard Problems. Hardware. Physics. Mat...
Robots…. Name : Mohammed Ahmed Al
by accompanypepsi
Blooshi. ID : ST 102 11 20 162. Grade : 10.02. Wha...
Telepresence Robots Ayesha Fathima, Breanne Happell, Saraf Rahman,
by dayspiracy
Yan Yan. Overview. What are Telepresence Robots?. ...
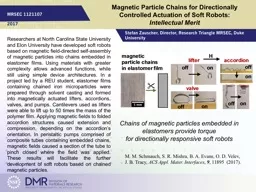
Magnetic Particle Chains for Directionally Controlled Actuation of Soft Robots:
by giovanna-bartolotta
Magnetic Particle Chains for Directionally Contro...
Robots with four wheels Drive forward or back wheels
by conchita-marotz
Drive and turn both forward and back wheels. Sens...
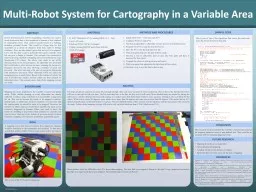
Robots lend themselves well to mapmaking. Any place not ope
by yoshiko-marsland
humans. This research was conducted in order to d...
Emotion and Sociable Humanoid Robots (Cynthia Breazeal)
by sherrill-nordquist
Yumeng. Liao. Usually, robots are designed as au...
Robots in the Classroom
by pasty-toler
What is a robot?. What do you know about robots?....
Famous Robots in History
by phoebe-click
Tom Bickford. Maine Robotics. © 2012. Where it c...
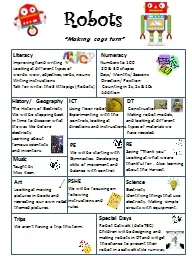
Robots
by giovanna-bartolotta
“Making cogs turn”. Literacy ...
Social Integration of Robots into Groups of Cockroaches to
by test
Modeled collective shelter finding in cockroaches...
Robots
by phoebe-click
By: Monét, Nitika, and Liz. What is a Robot??. A...
Flocks of Robots
by alexa-scheidler
Coordinated . Multi-robot Systems. Dylan A. . She...
Interactive Furry Robots
by natalia-silvester
Fawn . Qiu. Final Project Proposal. Proposal. We...
Virtual Inclusion via Telepresence Robots in the Classroom
by pamella-moone
Veronica Newhart, UC Irvine. Dr. Mark . Warschaue...
Lecture Future Robots Future Medical Delivery Neural
by nash241
11 . – July . 19, . 2012. Today:. Discussion - E...
An interdisciplinary
by ethlyn
collaboration of Theatre Arts and Social RoboticsT...
__________________ Corresponding author Emailjanrosellupcedu Ja
by hanah
In work environments, the use of dexterous mobile ...
What do you know about
by relylancome
. robotics. in . healthcare. ? . Play . the. qui...
Introduction to Robotics
by test
Robot. ”programmable, multifunction, manipula...
Load More...