PPT-Seismological Analysis Methods
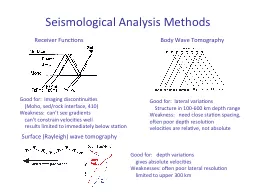
Receiver Functions Body Wave Tomography Surface Rayleigh wave tomography Good for Imaging discontinuities Moho sed rock interface 410 Weakness cant see gradients
Download Presentation
"Seismological Analysis Methods" is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.