Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'state robot'
state robot published presentations and documents on DocSlides.
A Confidence-Based Approach to Multi-Robot Demonstration Le
by briana-ranney
Sonia Chernova Manuela . Veloso. Carne...
Robot Control Open Loop Control
by ellena-manuel
Sends commands to make a robot preform some movem...
State Estimation and Kalman Filtering
by myesha-ticknor
Zeeshan. Ali . Sayyed. What is State Estimation?...
Q-Learning Example that goes to completion and can be worked with pencil and paper
by oryan
Adapted from . http://. mnemstudio.org. /path-find...
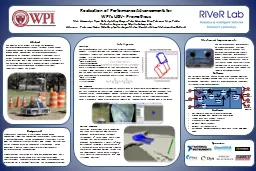
Sponsors
by debby-jeon
Mechanical Improvements. Software. The software i...
From motor babbling to hierarchical learning by imitation:
by trish-goza
Yiannis. . Demiris. and Anthony . Dearden. By J...
Active SLAM in Structured Environments
by sherrill-nordquist
Cindy Leung, . Shoudong. Huang and . Gamini. . ...
Bayes Filters
by stefany-barnette
Pieter . Abbeel. UC Berkeley EECS. Many slides ad...
Homework 1 (with additional explanations and
by kittie-lecroy
new additional . explantions. ). Intelligent Robo...
Remote Control for CPG-
by lindy-dunigan
based. robot. Laura Balthazard. Semester. . pro...
Control 3 Motion Control (kinematic control)
by lindy-dunigan
for mobile platform. The objective of a kinematic...
State Estimation Probability, Bayes Filtering
by marina-yarberry
Arunkumar. . Byravan. CSE 490R – Lecture 3. In...
Hierarchical and State-based Architectures for Robot
by lindy-dunigan
Behavior. Planning and Control. Philipp Allgeuer...
Decision-Making Under Uncertainty
by radions
Overview. Two models of decision-making under unce...
Robust Localization
by trish-goza
Kalman Filter. & LADAR Scans. State Space Rep...
Artificial Intelligence
by ellena-manuel
CS482, CS682, MW 1 – 2:15, SEM 201, MS 227. Pre...
How are things going?
by olivia-moreira
Core AI Problem. Mobile robot path planning: ide...
Homework 1
by cheryl-pisano
Lab 3: . Kinematics. Vision. Open loop control vs...
Example of simple Braitenberg
by alexa-scheidler
. Vehicle type of robot in Robot C with quantum ...
Programming Concepts C: GOTO_Beacon
by phoebe-click
ENGR 10. Introduction to Engineering. 1. Global. ...
Autonomous Cyber-Physical Systems:
by liane-varnes
Temporal Logic. Spring 2018. CS 599.. Instructor:...
How are things going? Core AI Problem
by lucinda
Mobile robot path planning: identifying a traject...
Wireless and Mobile Systems
by bety
for the IoT. Nirupam Roy. M-W 2:00-3:15pm. CHM 122...
1 Slides from D. Fox. W.
by debby-jeon
Burgard. , C. . Stachniss. ,. M. . Bennewitz. , K...
1 Slides from D. Fox. W.
by trish-goza
Burgard. , C. . Stachniss. ,. M. . Bennewitz. , K...
February 9, 2016
by liane-varnes
Introduction to Artificial Intelligence ...
Probability: Review
by faustina-dinatale
Pieter . Abbeel. UC Berkeley EECS. Many slides ad...
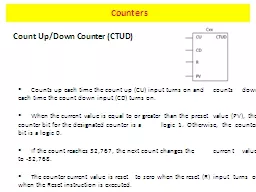
Counters
by lois-ondreau
Count Up/Down Counter (CTUD). Counts up each ti...
SEIF,
by lois-ondreau
EnKF. , EKF SLAM, Fast SLAM, Graph SLAM. Pieter ....
Load More...