Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robots-Mapping'
Robots-Mapping published presentations and documents on DocSlides.
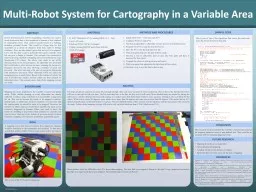
Robots lend themselves well to mapmaking. Any place not ope
by yoshiko-marsland
humans. This research was conducted in order to d...
Mobile Robots Why do robots need to move?
by conchita-marotz
What defines a robot?. Sense. – a robot has to...
Concept Mapping Mind Mapping and Argument Mapping The University of
by mackenzie
these tools may offer educators as yet unrealised ...
Acceptance and Gender Perceptions of Robots in a U.S. Context
by willow
Kate k. mays & . james. E. Katz. Division of ...
Robots By: Monét, Nitika, and Liz
by claire
What is a Robot??. A . robot. is a machine or...
Robots INST 4200 David J Stucki
by shoulderheinz
Spring 2015. Hard Problems. Hardware. Physics. Mat...
Robots…. Name : Mohammed Ahmed Al
by accompanypepsi
Blooshi. ID : ST 102 11 20 162. Grade : 10.02. Wha...
Telepresence Robots Ayesha Fathima, Breanne Happell, Saraf Rahman,
by dayspiracy
Yan Yan. Overview. What are Telepresence Robots?. ...
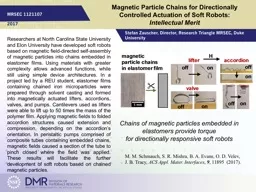
Magnetic Particle Chains for Directionally Controlled Actuation of Soft Robots:
by giovanna-bartolotta
Magnetic Particle Chains for Directionally Contro...
Robots with four wheels Drive forward or back wheels
by conchita-marotz
Drive and turn both forward and back wheels. Sens...
Robots in the Real World
by faustina-dinatale
Advanced Math and Science Academy. iRobot, UMass ...
Wendell Wallach: Ethics, Law, and the Governance of Robots
by sherrill-nordquist
J. Blackmon. Introduction. Alan Turing (1950) and...
Emotion and Sociable Humanoid Robots (Cynthia Breazeal)
by sherrill-nordquist
Yumeng. Liao. Usually, robots are designed as au...
Robots in the Classroom
by pasty-toler
What is a robot?. What do you know about robots?....
Famous Robots in History
by phoebe-click
Tom Bickford. Maine Robotics. © 2012. Where it c...
WELDING ROBOTS
by debby-jeon
INTRODUCTION. . Robot Welding . is a process of...
Robots
by giovanna-bartolotta
“Making cogs turn”. Literacy ...
Social Integration of Robots into Groups of Cockroaches to
by test
Modeled collective shelter finding in cockroaches...
Robots
by phoebe-click
By: Monét, Nitika, and Liz. What is a Robot??. A...
Flocks of Robots
by alexa-scheidler
Coordinated . Multi-robot Systems. Dylan A. . She...
Interactive Furry Robots
by natalia-silvester
Fawn . Qiu. Final Project Proposal. Proposal. We...
Whisking with Robots – From Rat Vibrissae to
by giovanna-bartolotta
Biomimetic. Technology for Active Touch. Tony J....
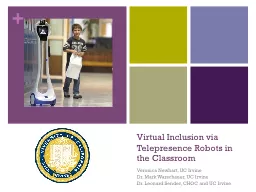
Virtual Inclusion via Telepresence Robots in the Classroom
by pamella-moone
Veronica Newhart, UC Irvine. Dr. Mark . Warschaue...
Market mapping Market mapping
by giovanna-bartolotta
This section covers the following: . What market ...
Multibeam Mapping The Evolution of Mapping the Ocean
by myesha-ticknor
Lead line mapping. Lead line mapping was the earl...
Combined sequence based and genetic mapping analysis of complex traits in outbred rats
by maisie
Baud, A. et al. . Rat Genome Sequencing and Mappi...
Electrophysiological study- mapping TECHNIQUES
by sophie
DR HIMAL RAJ.M. SR CARDIOLOGY. Contents . History....
RAMP: Resource-Aware Mapping for CGRAs
by dandy
Shail Dave. ,. Mahesh Balasubramanian, Aviral Shr...
Microenvironment mapping via Dexter energy transfer on immune cells
by adah
by Jacob B. Geri, James V. Oakley, Tamara Reyes-Ro...
Data Analysis Group NGS Read Mapping
by carny
16. th. August 2019. Alignment basics. NGS alignm...
Curriculum Mapping: Flipped
by cappi
, . Automated. , and . Easy. Gerald Thrush, PhD &a...
Dr. James Abbott Read Mapping
by reese
j.abbott@dundee.ac.uk. From your home directory, r...
Mapping SIG Conference Call
by brooke
April 13, 2015. 19:00 UTC. https://. global.gotome...
Pin Mapping Key Concepts
by tabitha
From IBIS 6.0…. “The [Pin Mapping] keyword nam...
Accelerating Read Mapping with
by everly
FastHASH. Hongyi. . Xin. †. . . Donghyuk. L...
Begna T Yesuf H 2021 Genetic mapping in crop plants Open J Plant S
by summer
cation of marker-trait associations, mapping Quant...
Mind MappingBy Jaylyn E PaulinoWhat is ind appingMind mapping istech
by linda
Components of a mind map:Main idea/topic/conceptSu...
QTL mapping: Definition and case studies
by GoodGirlGoneBad
The . process . of constructing . linkage . maps ....
High-resolution mapping of wheat chromosome arm 5AS
by thomas
harbouring. the . Fusarium. head blight resistan...
Mapping Urban Economies Beyond National Histories. Spatial-Economic Organizations of Ottoman Neighb
by arya
M. . Erdem. . Kabaday. ı. , . Istanbul . Bilgi. ...
Load More...