PDF-A Robot with the Right
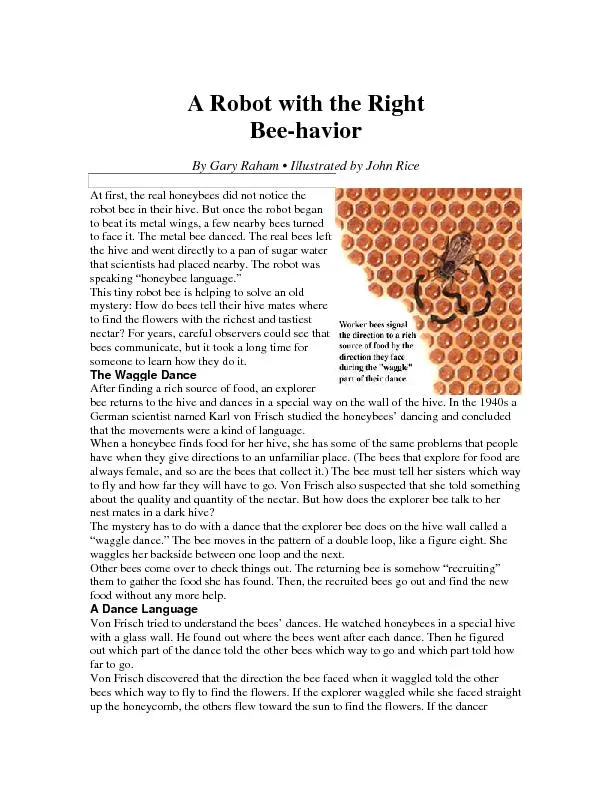
Beehavior By Gary Raham 149 Illustrated by John Rice At first the real honeybees did not notice the robot bee in their hive to beat its metal wings a few nearby
Download Presentation
"A Robot with the Right" is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.