Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'position robot'
position robot published presentations and documents on DocSlides.
ROBOT SENSORS AND ROBOT VISON
by marina-yarberry
T. . Bajd. and M. . Mihelj. Proprioceptive senso...
Gyro Sensor Positioning Robot DESIGN Lesson
by danika-pritchard
How Many Gyros should your robot have?. Depends o...
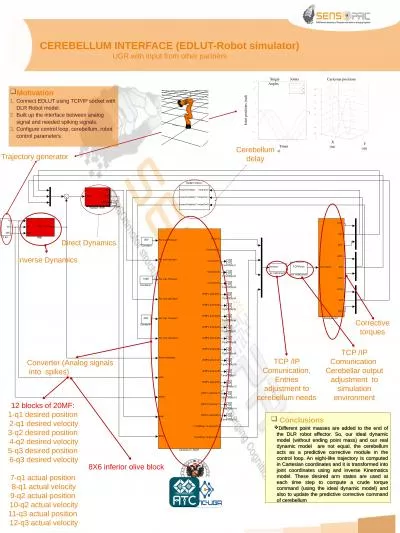
CEREBELLUM INTERFACE (EDLUT-Robot
by byrne
simulator. ). UGR . with. input . from. . other....
Inverse Kinematics Kris
by natalia-silvester
Hauser. CS B659: Principles of Intelligent Robot ...
Gaits
by natalia-silvester
Cost of Transportation. Wheeled Mobile Robots. Mo...
TGI Friday’s Mistletoe Drone
by debby-jeon
www.uasvision.com. /2014/12/10/mistletoe-. quadco...
Gaits
by luanne-stotts
Cost of Transportation. Wheeled Mobile Robots. Mo...
Course Presentation
by mitsue-stanley
Outline. 1. Introduction. 2. The Bayes Filter. 3....
STANDARDS IN ROBOTICS
by trish-goza
T. . Bajd. and M. . Mihelj. Coordinate frames of...
Locomotion: Chapter 1
by conchita-marotz
Enabling robots to move. Many bio-inspired method...
Communication
by yoshiko-marsland
Piazza. Code. Email: Angel. Computers in Lab. Joi...
Locomotion: Chapter 1
by faustina-dinatale
Enabling robots to move. Many bio-inspired method...
Kinematics
by lindy-dunigan
u. sing slides from D. . Lu. Goals of this class....
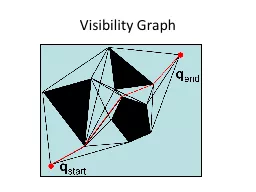
Visibility Graph
by liane-varnes
Voronoi. Diagram. Control is easy: stay equidist...
Mapping and Localization with RFID Technology
by tatiana-dople
Matthai Philipose, Kenneth P Fishkin, . Dieter Fo...
Introduction to Robotics
by test
Robot. ”programmable, multifunction, manipula...
Control 3 Motion Control (kinematic control)
by lindy-dunigan
for mobile platform. The objective of a kinematic...
Intro to Movement of robots and introduction to kinematics of robots
by alida-meadow
Kinematics: . constraints on getting around the ...
NAO - II Major Project – SSAD
by carneos
Advisor . : . Dr. . Kamalakar. . Karlapalem. Men...
Mobile Robot Localization and Mapping with Uncertainty usin
by pamella-moone
Paper – Stephen Se, David Lowe, Jim Little. Pre...
Introduction to Computer Science – Chapter 5
by min-jolicoeur
CSc. 2010. Spring 2011. Marco Valero. Overview. ...
Introduction to Computer Science – Chapter 5
by tatyana-admore
CSc. 2010. Spring 2011. Marco Valero. Overview. ...
Basic Turning
by lois-ondreau
BEGINNER PROGRAMMING LESSON. Lesson Objectives. L...
Planning With
by pasty-toler
Uncertainty for UAVs. Sameer. . Ansari. Billy Ga...
BEGINNER EV3 PROGRAMMING
by pamella-moone
Lesson. By: Droids Robotics. Topics Covered:. Tur...
RGB,
by sherrill-nordquist
HSL, . HSV. HSL, HSV: easier to define, closer to...
4/10/2018 IENG 475: Computer-Controlled Manufacturing Systems
by kittie-lecroy
1. IENG 475 - Lecture 15. Robot Programming in AC...
Simultaneous Localization and Mapping
by lois-ondreau
Matthew Thompson, UF. matthewbot@ufl.edu. Prolifi...
Human Interaction Development Using the Countess Quanta Robot
by danika-pritchard
Brad Pitney. Yin Shi. Development Overview. Robot...
Autonomous Navigation for Flying Robots
by dsuser1
Lecture 2.3:. 2D Robot Example. Jürgen . Sturm. T...
HOMOGENOUS TRANSFORMATION
by bobradio
MATRICES. T. . Bajd. and M. . Mihelj. The homogen...
Learning Agile and Dynamic Motor Skills for Legged Robots
by KissableLips
Jemin. . Hwangbo. , . Joonho. Lee, Alexey . Doso...
Load More...