PDF-CHANGING TO ROBOT DECEPTICON BLUDGEON
Author : trish-goza | Published Date : 2015-02-25
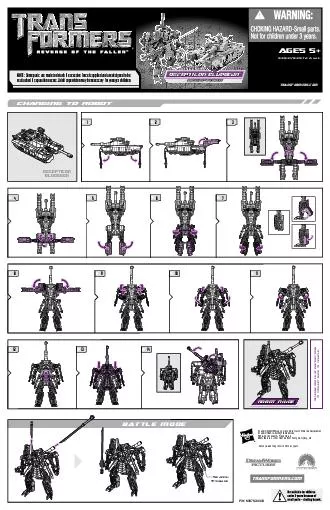
43OEPATAEAETOETACHIFEXCEIVEFOCEIAPPLIEAAEEIGETO BE EATTACHEIFEPAATIOOCCUULTUPEVIIOAYBEECEAYFOYOUGECH ILE AGES 9383183972 Asst TRANSFORMERSCOM 12 13 10 14 11 DECEPTICON
Presentation Embed Code
Download Presentation
Download Presentation The PPT/PDF document "CHANGING TO ROBOT DECEPTICON BLUDGEON" is the property of its rightful owner. Permission is granted to download and print the materials on this website for personal, non-commercial use only, and to display it on your personal computer provided you do not modify the materials and that you retain all copyright notices contained in the materials. By downloading content from our website, you accept the terms of this agreement.
CHANGING TO ROBOT DECEPTICON BLUDGEON: Transcript
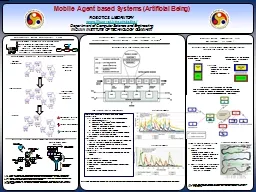
43OEPATAEAETOETACHIFEXCEIVEFOCEIAPPLIEAAEEIGETO BE EATTACHEIFEPAATIOOCCUULTUPEVIIOAYBEECEAYFOYOUGECH ILE AGES 9383183972 Asst TRANSFORMERSCOM 12 13 10 14 11 DECEPTICON DECEPTICON DECEPTICON DECEPTICON BLUDGEON DECEPTICON BLUDGEON 57513 2009 Drea. Adam Finkelstein. COS 116: Spring . 2012. Today: Understanding a simple robot. Why?. Larger goal: seek an answer to. . “. What is Computation?. ”. Acquire insight into technology that will . become pervasive within the next decade.. Ready, SET, Go! Workshop. SDSU, Fall 2013. Programming is Fun!. Tell the Robot exactly what to do & watch it run.. Be Specific!. Use Loops to repeat statements.. Put several actions together to make a dance!. Sonia Chernova Manuela . Veloso. Carnegie Mellon University. Computer Science Department. Policy Development. Learning from Demonstration:. Access/select sensor data. Develop actions. Provide demonstrations. Lesson 2. Teaching Assistant: . Roi. . Yehoshua. roiyeho@gmail.com. . Summer 2015. Agenda. Simulating multiple robots in Stage. Collision . avoidance. Robots . synchronization. Creating custom . messages. Gui. . Cavalcanti. 5/12/2011. Locomotion and Manipulation. Overview. Locomotion. Types of locomotion. Stability. Locomotion design. Models. Types of control. Gaits. Manipulation. Compliance. Forward . Mech Team. by: Nick Thomsen, Faraz Khan, Mark Wei and Vish Gopalakrishnan . General Rules. Section 1. General Robot Definition. Robot must have certain basic systems. Power. Communications. Control. Movement. 2011/12/08. Robot Detection. Robot Detection. Better Localization and Tracking. No Collisions with others. Goal. Robust . Robot . Detection. Long . Range. Short. . Range. Long Range. C. urrent . M. ethod. Intro to Spy Robot. A Spy robot is a mobile robot that can go through any neighborhood for the mission of your rescue team. . As the name suggests, Spy robot is a rescue robot in which you can use it for monitoring an environment and also for serious rescue missions. . What is ROBOT ?. DEFINITION. “A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks.”. Team . JEEVES. Daniel . Steffy. , . Alissa. Halvorson, . Bogdan. . Pisica. , Christopher Pearson, . Hameed. . Ebadi. A Beacon-Sensing, Path Finding Robot Operating in a Crowded Environment. Project Objectives. Mobile Agent Cloning for . Servicing . Networked . Robots . 2. . STIGMERGICALLY CONTROLLING A POPULATION OF. HETEROGENEOUS MOBILE AGENTS USING CLONING RESOURCE. 4. . ROBOTICS . LABORATORY . www.iitg.ernet.in/cse/robotics/. Hideki . Kozima. and Hiroyuki Yano. Introduction. Shift . from . intentional . stance to design . stance. Attribute ability to the designers not the robot.. I. magine . a robot that has learned and . Hesham. . Alsahafi. . and . Majed. . Almaleky. Robotics, Intelligent Sensing and Control (RISC) Lab . School of Engineering, University of Bridgeport . ABSTRACT. The accumulation of waste has become a major problem in urban city dumps. There are different kinds of waste that affect our environment, for example metallic and plastic waste. Developing metallic waste collection robot system is mighty challenge. There is very limited research related with robot systems that specialize in the collection and processing of waste. In these slides, we propose robotic system that can be used for waste metallic collection. This robot is equipped with metal detector, ultrasonic sensor, control and power unit, and actuators. This autonomous robot can perform tasks such as obstacle avoidance and metal detection. . Qimin Zhang. . Technology and Engineering Center for Space Utilization . Chinese Academy of Sciences. 2017.5. Design of Motion Control System for Frog-inspired . Bionic Hopping Robot. Introduction. Mechanical Model and Hopping Motion Strategy.
Download Document
Here is the link to download the presentation.
"CHANGING TO ROBOT DECEPTICON BLUDGEON"The content belongs to its owner. You may download and print it for personal use, without modification, and keep all copyright notices. By downloading, you agree to these terms.
Related Documents